




エッジコンピューティングで実現した遠隔収穫ロボットの運用成功
エッジコンピューティングと遠隔収穫ロボットの挑戦
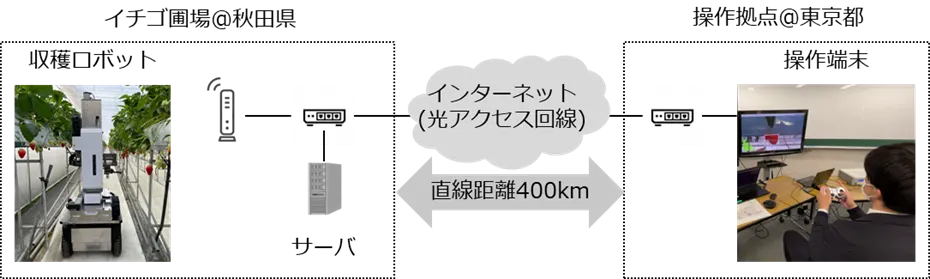
東京と秋田の400kmを越えて、農業の未来を変える新技術が誕生しました。日本電信電話(NTT)グループが中心となって実施した実証実験では、東京都の操作者が秋田県に設置された収穫ロボットを遠隔操作し、イチゴを収穫することに成功しました。
実証実験の背景
日本の農業は、労働力不足という深刻な課題に直面しています。この問題を解決するために、スマート農業技術の導入が進められています。従来の手法では水やりや追肥の最適化が中心でしたが、特に収穫作業においては人手が不可欠でした。そのため、農業用ロボットを利用することで、稼働を削減することが求められています。
植物を扱う農業での自動化には限界があり、作業の多くを人間の判断が必要です。そこで、遠隔操作によるロボットの活用が重要視されています。
遠隔操作技術の実証
実証では、東京都にいる操作者が秋田県にあるイチゴ圃場に設置されたロボットをネットワークを通じて操作しました。カメラ映像を元に、イチゴの収穫適否を判断する情報がリアルタイムで伝送されます。操作者は、その映像を見ながらロボットを操作し、傷つけることなくイチゴを収穫することに成功しました。
システムの構成と機能
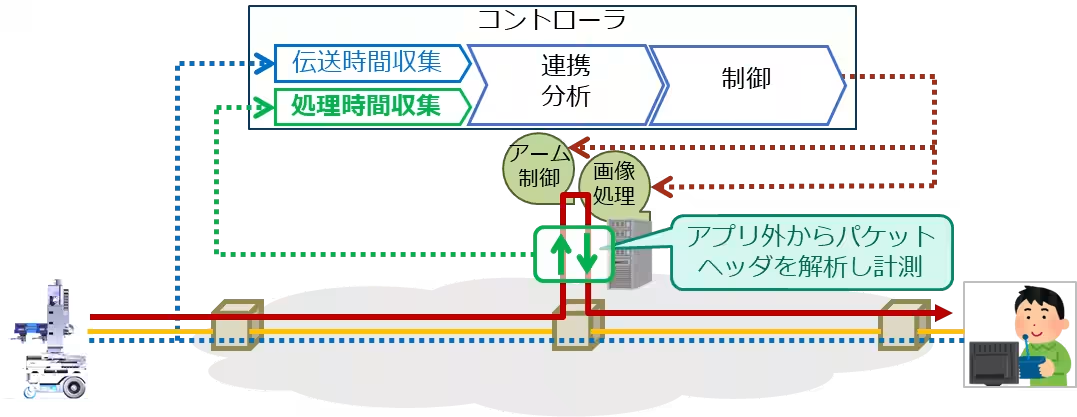
このシステムは、秋田のイチゴ圃場に収穫ロボットと画像処理サーバを設置し、東京都の操作端末と接続されています。ネットワークを利用した映像伝送により、操作者は遠隔地からロボットを精密に制御し、収穫作業を行うことが可能です。この技術の重要なポイントは、通信品 質の変動に応じてリアルタイムで制御を行うことで、安定した操作性を確保することです。
運用上の改善
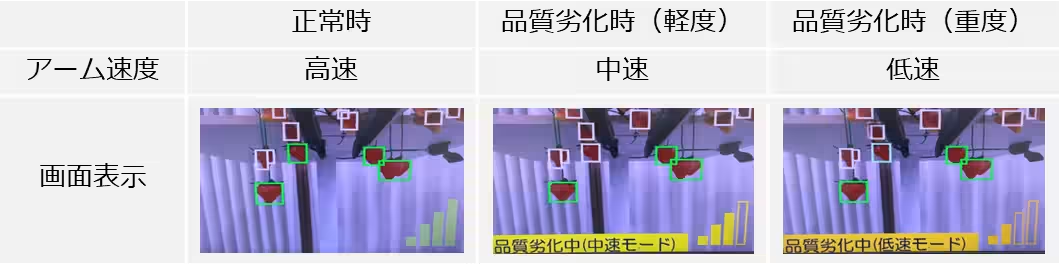
特に注目すべきは、エンドツーエンドの遅延時間に基づいて、ロボットアームの速度を調整する機能です。この機能により、遅延環境での成功率が大幅に向上し、最大30%の改善が実現されました。実験参加者全員がこの改善を実感したというデータも得られています。
今後の展開
今後、この遠隔操作技術は農業分野だけでなく、様々な業界に応用される可能性があります。NTTグループは、引き続きこの技術の実用化に向けた取り組みを進め、労働生産性向上や新しい働き方の実現を目指しています。
この技術は、2025年に開催される「つくばフォーラム2025」での展示が予定されています。これにより、より多くの人々に商業化の可能性と利便性を伝え、農業の新たな未来を築く一助となることでしょう。未来の農業の形を見据え、私たちの生活を変える一歩が踏み出されたのです。

会社情報
- 会社名
- 東日本電信電話株式会社
- 住所
- 東京都新宿区西新宿3-19-2
- 電話番号
トピックス(地域情報)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。