




チューリング、世界的カンファレンスCVPR 2026で2本の論文を発表
チューリングが世界的な数理的イベントに選ばれる
テクノロジーの急速な進化の中で、チューリング株式会社がコンピュータービジョンの国際会議「CVPR 2026」で2本の研究論文が採択されたことは、同社の研究開発の成果を示すものです。
CVPR(Computer Vision and Pattern Recognition Conference)は、コンピュータービジョンに関する世界的に権威のある学会であり、毎年多数の論文が投稿され、その中から厳密な審査を経て採択倍率が高く決定されます。チューリングが採択した二つの論文は、それぞれ異なる視覚や学習に関する革新的な手法を提案しています。
採択された論文の概要
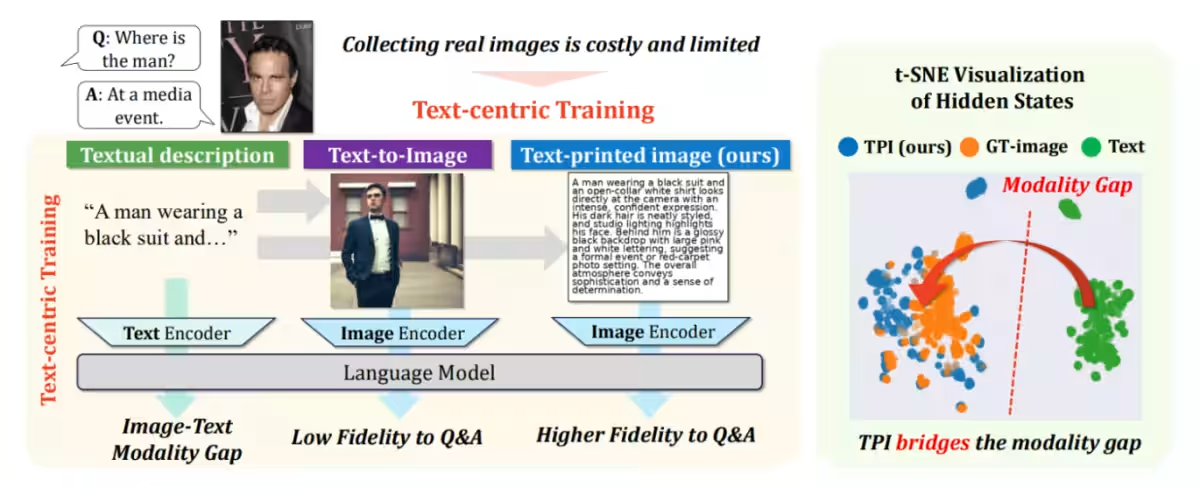
1. Text-Printed Image
最初の論文「Text-Printed Image: Bridging the Image-Text Modality Gap for Text-centric Training of Large Vision-Language Models」では、実際の画像ではなく、テキスト記述のみで大規模な視覚-言語モデルを強化する新しい手法が提唱されています。この手法は、テキストを白地のキャンバス上にそのまま描くことで、テキストの意味を損なうことなく既存の画像学習パイプラインに組み込むことを可能にします。多様なモデルとベンチマークを用いた検証で、従来の画像生成モデルよりも有効であることが示されています。
論文の詳細はこちらのリンクから確認できます。さらに、この技術がどのように進化を遂げるのか、チューリングのテックブログでも詳しく説明されています。
2. P2GS
二つ目の論文「P2GS: Physical Prior-guided Gaussian Splatting for Photometrically Consistent Urban Reconstruction」は、異なる条件で撮影された画像から高品質な3次元空間の再構成を行う新手法を透過的に紹介しています。従来の手法では、カメラごとの明るさや色の違いが影響し、不自然な見た目が生成されていましたが、提案されたP2GSは、こうした問題を解消し、異なる環境下でも安定した特徴を持つ3Dモデルの再構築が可能です。この技術は、自動運転のシミュレーション環境において非常に有用な技術となります。
自動運転の未来に向けた貢献
両論文は、大規模モデルの学習やシミュレーション環境の高度化により、開発プロセスを効率化する可能性を秘めています。それにより、安全かつ安定した自動運転システムの形成が期待され、チューリングのビジョンが現実味を帯びています。
チューリングについて
チューリングは、東京都大田区に本社を構えるスタートアップ企業で、完全自動運転の開発に注力しています。同社はE2E(End-to-End)自動運転AIを開発し、環境認識、経路計画、運転制御を一連のプロセスとして統合することに取り組んでいます。代表取締役の山本一成氏がリーダーシップを取り、全ての条件下において車両が自動的に運転することを可能にする技術基盤の強化を目指しています。
チューリングの公式サイトでは、この最先端の技術に関心がある仲間を積極的に募集しており、オープンオフィスやテックトークなどのイベントを定期的に開催しています。 詳細についてはiConnpassのページもご参照ください。
今後のチューリングの動きに注目が集まります。
会社情報
- 会社名
- Turing株式会社
- 住所
- 東京都品川区大崎1丁目11−2 ゲートシティ大崎 イーストタワー4階
- 電話番号
トピックス(IT)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。