





最新技術を活用した除雪支援システム「SRSS」実証実験が八甲田で始まる
高精度地図活用の除雪支援システム「SRSS」実証実験
青森県の八甲田と十和田湖をつなぐ「八甲田・十和田ゴールドライン」では、2025年2月20日から3月31日まで、高精度3次元地図を応用した除雪支援システム「SRSS」の実証実験が行われます。このシステムは、雪に埋もれた道路の情報をリアルタイムで可視化し、除雪作業をより安全かつ効率的にサポートすることを目的としています。
除雪作業の現状と課題
冬季間、八甲田・十和田ゴールドラインは閉鎖され、春の訪れと共に「八甲田除雪隊」が除雪作業に取りかかります。しかし、従来の除雪作業では、経験豊富なオペレータの直感に頼る部分が多く、目印がない区間では位置情報の特定が難しいという課題があります。これにより、安全性の確保や後継者の育成に困難が伴う状況です。特に、技能を受け継ぐ人材の不足とともに作業の安全確保も重要な問題となっています。
新技術「SRSS」について
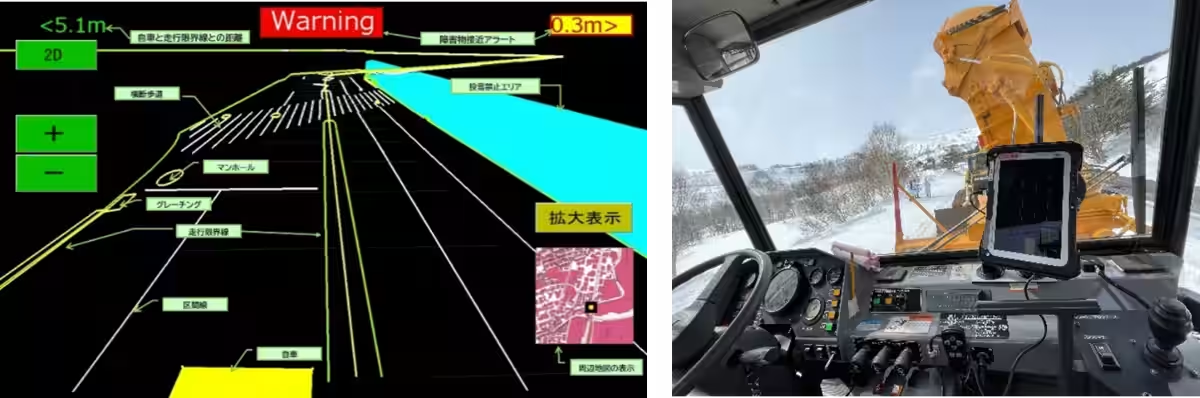
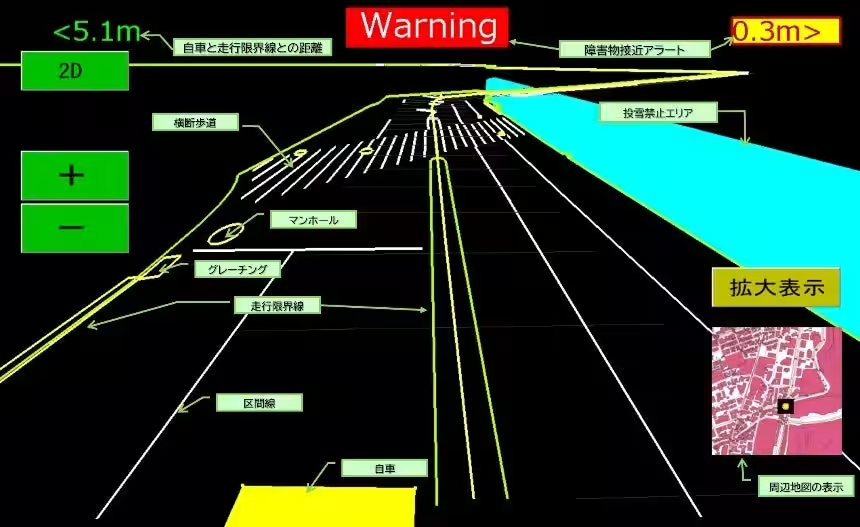
Axyz社が提供するSRSSは、これらの課題を解決するために、高精度の3次元地図データと除雪車の自己位置情報を連携させたシステムです。高精度地図には、路肩やマンホールの位置情報が正確に記載されており、除雪車の操作はこれに基づいて行われます。これにより、目印が無い場所でも的確に作業を進めることが可能となり、作業の時間短縮や安全性の向上が期待されています。
実証実験の目的と内容
今回の実証実験では、SRSSを活用することによって除雪作業をどのように安全かつ効率的に行えるかを検証します。具体的には、作業時間の短縮や技術の継承面での貢献を評価することが目標です。このシステムの検証を通じて、地域の除雪活動を支える「八甲田除雪隊」の負担を軽減し、持続可能な担い手の確保にもつながることが期待されます。
実証実験概要
- - 期間: 2025年2月20日(木)~3月31日(月)
- - 対象区間: 八甲田・十和田ゴールドライン(酸ヶ湯ゲート~谷地ゲート)約8km
- - 内容: SRSSによる除雪作業の安全性向上と効率化の検証
まとめ
ダイナミックマッププラットフォームとその子会社、Axyzによって開発されたこの「SRSS」は、自動運転車にも活用されている高精度なHDマップと、正確な位置情報取得を可能にするRTK測位技術を組み合わせたものです。この技術により、除雪作業が従来よりも安全で効率的に進められることに期待が寄せられています。
この取り組みは、単なるテクノロジーの導入にとどまらず、地域の人々の生活を守り、持続可能な社会の実現を目指したものです。今後の実証実験の結果がどのような影響をもたらすのか、注目が集まります。


会社情報
- 会社名
- ダイナミックマッププラットフォーム株式会社
- 住所
- 東京都渋谷区渋谷2-12-4ネクストサイト渋谷ビル12階
- 電話番号
- 03-6459-3445
トピックス(地域情報)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。