




無償公開された双腕ロボットAI学習データセットの進化と影響
日本の双腕ロボットAI開発を変革する無償データセットの誕生
国立研究開発法人 産業技術総合研究所(以下「産総研」)は、人工知能研究センターの研究員による新たな取り組みとして、双腕ロボットAIの開発を支援する大規模データセット「AIST-Bimanual Manipulation」を無償公開しました。これにより、ロボットAI技術の幅広い発展が期待されています。
無償公開の意義
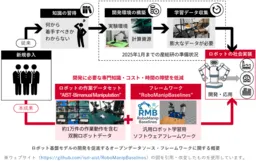
これまで、ロボットの学習には高い参入障壁がありました。「何から始められるのか分からない」「学習に必要なデータが揃わない」「環境構築が困難」といった多くの課題が、企業や研究機関の進展を妨げていました。産総研が提供する約1万件のアクションシーケンスが含まれた「AIST-Bimanual Manipulation」により、開発者は初めての方でも短期間で研究を開始できる環境が整いました。
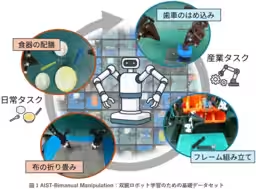
このデータセットは、日常生活や産業の現場において、両手を効果的に使うための学習に役立つことが目的とされています。特に、製造業や物流、介護などの分野で、人手不足を補う可能性が見込まれており、ロボットの実用化が急務となっています。さらに、これまでは主に片腕の利用が中心でしたが、このデータセットでは双腕協調作業が収録されており、多様な応用への道が開けます。
具体的な活用方法
「AIST-Bimanual Manipulation」データセットには、一方の手で物体を固定し、もう一方の手で精密に操作する作業など、人間が自然に行う動作が根底にあります。この協調動作を学習することによって、ロボットは製造ラインでの部品組み立てや、物流における物品の移動、さらには家庭での洗濯物の整理といった日常的な業務を効率良くこなすことが可能になるでしょう。
産総研では、データ収集において、リーダーフォロワー型遠隔操作システム「ALOHA」を使用しました。これにより、熟練した人間が行う作業をリアルタイムでロボットが模倣し、詳細な動作データを収集することができました。その結果、ロボットが日常で行う複雑な作業を学び、その成果を多くの現場で活用できるのです。
ロボット学習の新時代
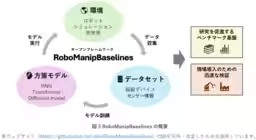
さらに、これに伴い「RoboManipBaselines」というソフトウェアフレームワークも無償提供され、多様なシミュレーターやロボットを共通インターフェースで扱えるように設計されています。このフレームワークには複数の最新学習手法が組み込まれており、さまざまなロボットへ容易に適用が可能です。
産総研は、これらの技術を駆使し、AI技術の進展を背景に、ロボットの基盤モデルを開発することで、日本におけるロボット競争力向上を図っています。将来的には、AI初心者でも簡単にロボットを操作できる環境が整備されることが期待されています。これにより、産業界は新たな技術革新を迎えることでしょう。
未来に向けた展望
この取り組みの発表は、2025年9月3日に第43回日本ロボット学会学術講演会で行われ、さらなる進展が報告される予定です。また、データセットとソフトウエアのダウンロードはGitHubから可能で、誰でも簡単にこれらのリソースを利用し始めることができます。
まとめ
無償公開された「AIST-Bimanual Manipulation」は、双腕ロボットの学習環境を大きく進化させる要素となり、多くの業界での実用化が期待されています。日本のロボット技術の未来に向けた重要な一歩として、今後の展開に目が離せません。


会社情報
- 会社名
- 産総研
- 住所
- 電話番号
トピックス(IT)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。