



箱庭ラボと湘南工科大学が手を組みドローンの故障問題を研究
箱庭ラボと湘南工科大学が手を組んだドローンの故障問題研究
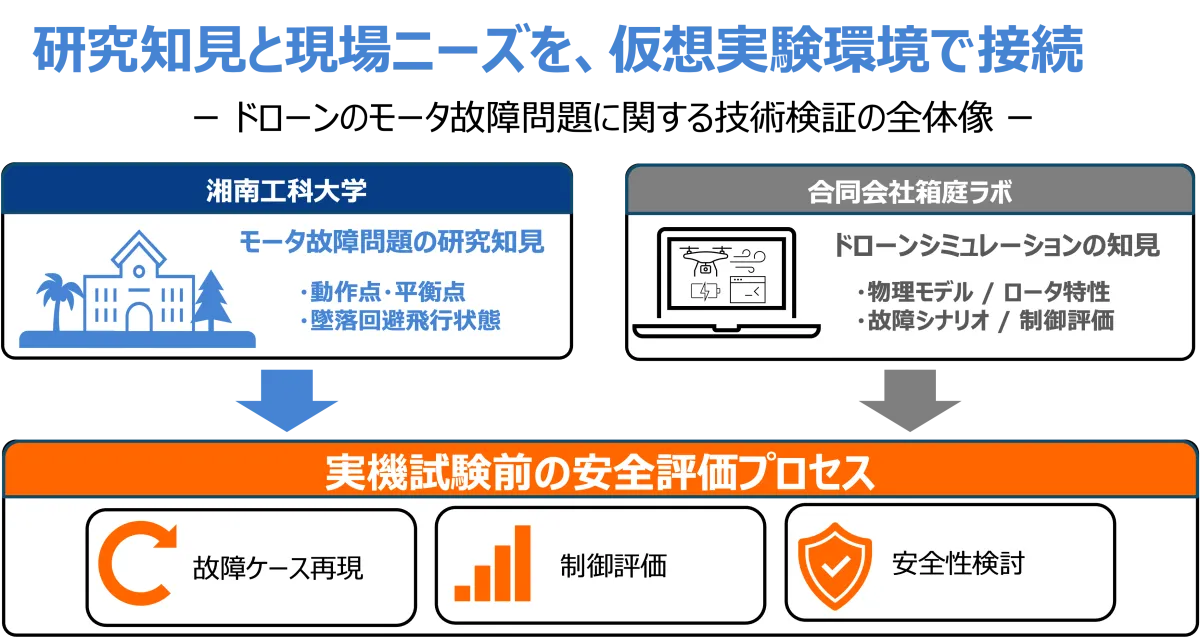
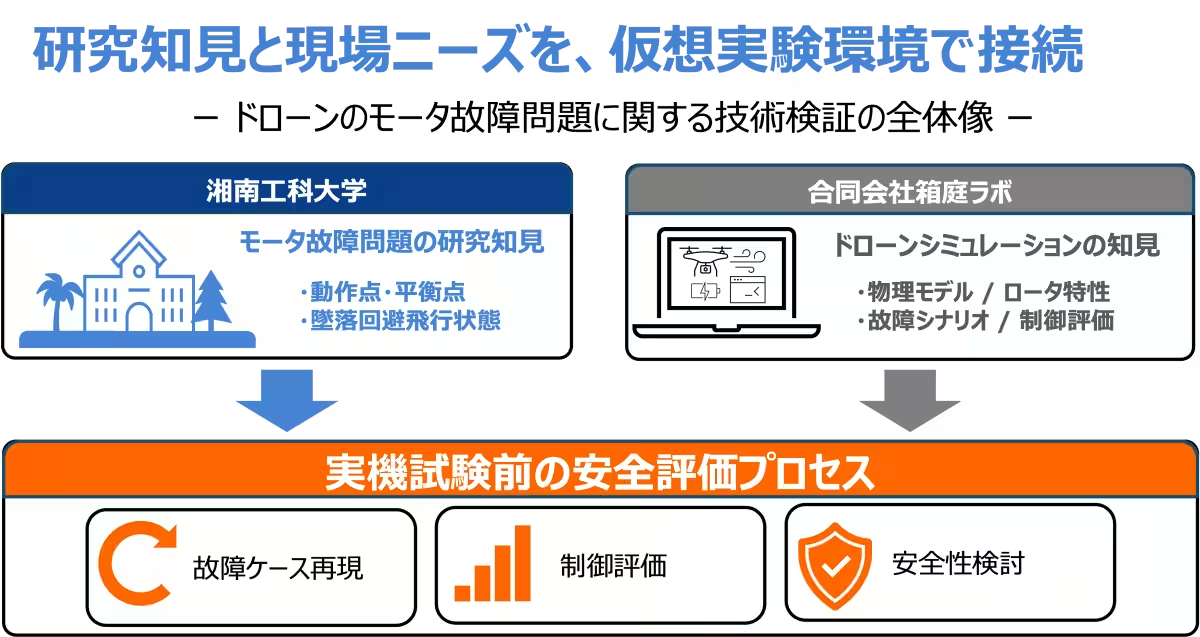
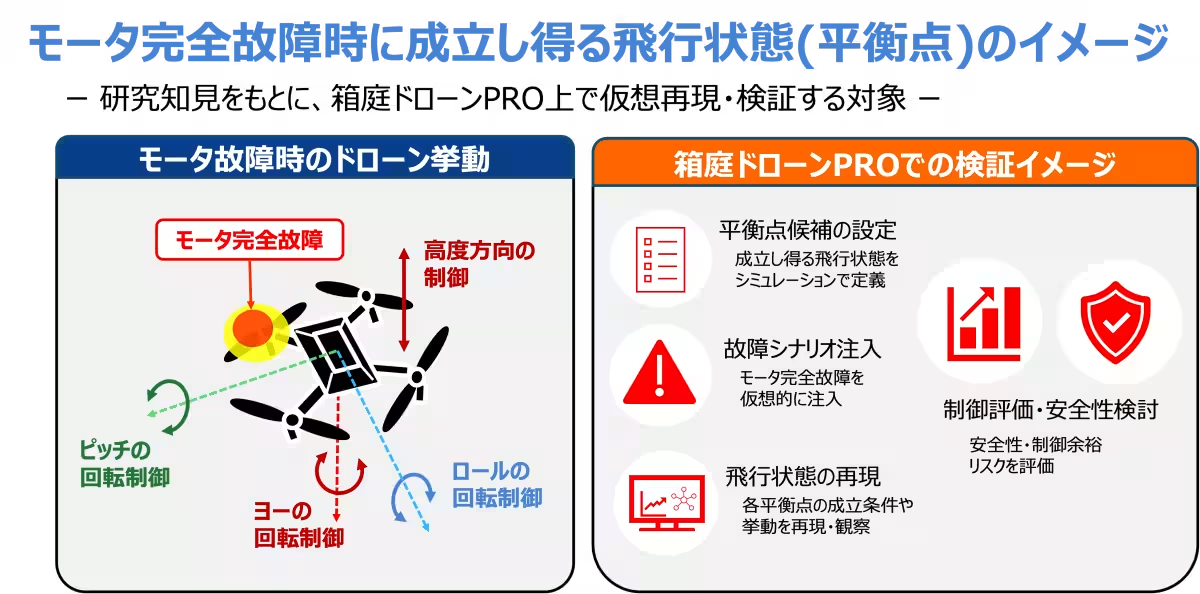
合同会社箱庭ラボは、湘南工科大学と共に、ドローンのモータ故障に関する仮想実験環境の技術検証を開始しました。このプロジェクトは、飛行形ドローンが抱えるモータ故障問題をテーマにしており、特にマルチロータ機の完全故障時における墜落回避の研究に基づいています。
ドローンのモータ故障問題への取り組み
近年、ドローンの社会実装が進む中で、様々な故障が発生することが懸念されています。実際の運用においては、モータの故障や制御異常、さらには外部からの影響などに対する安全性の評価がますます重要視されています。しかし、実機を使った故障試験は、安全性やコスト、再現性において大きな課題を抱えています。特にモータの完全故障といった異常状態を実環境で意図的に再現することは困難です。そのため、都合の良い方法として、仮想実験環境が求められています。
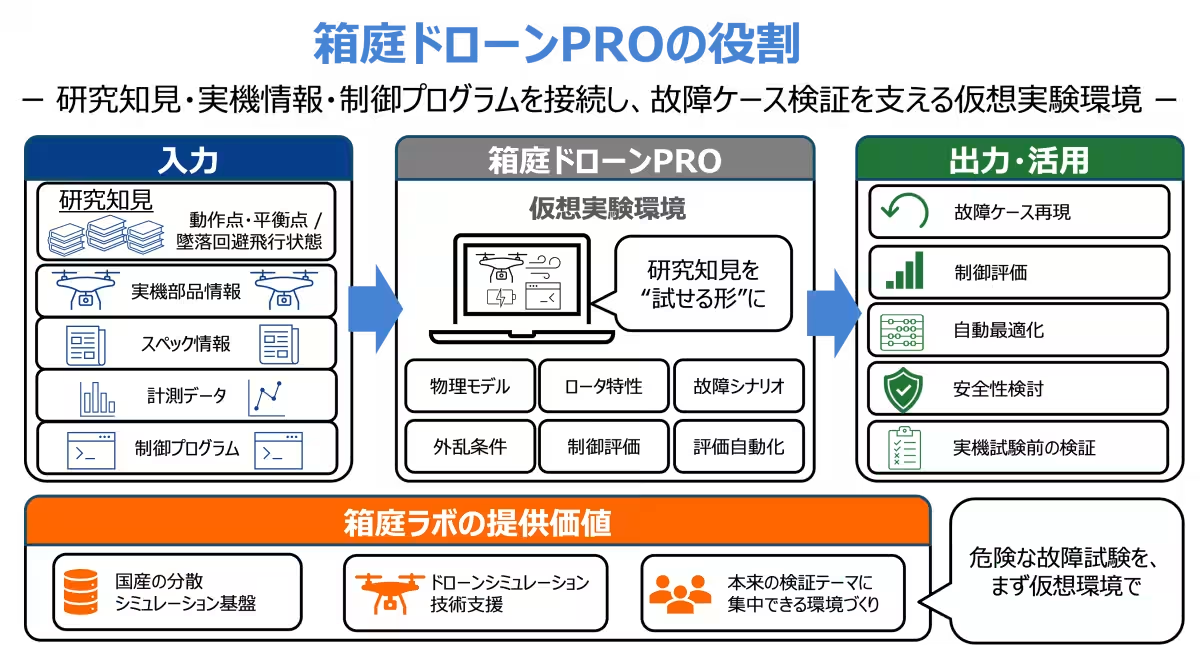
この取り組みでは、湘南工科大学の岡崎秀晃教授と磯貝海斗氏が得た研究成果を活用し、箱庭ラボによる分散シミュレーションシステム「箱庭」および「箱庭ドローンPRO」を組み合わせて、実機検証前に安全に故障ケースを評価できます。これにより、研究者や開発者は実環境でのリスクを先に洗い出し、安全に取り組むことが可能になります。
箱庭ドローンPROとは
箱庭ドローンPROは、単なる飛行可視化や操縦訓練のためのシミュレーターにとどまらず、実機由来の物理モデル、ロータ特性、故障シナリオ、制御プログラムなどを接続することで、故障ケース検証や制御評価を実施するための高度な仮想実験環境です。OSS(オープンソースソフトウェア)シミュレーターを使った研究開発は、環境構築やモデル調整、内容の評価自動化など、専門的な知識を要することがあり、箱庭ラボは国産の分散シミュレーション基盤及びドローンシミュレーション技術を組み合わせることで、開発者が本来のテーマに集中できるサポートを行っています。
今後の展望
本プロジェクトでは、ドローンが特定の飛行状況を維持するための釣り合い条件に関し、モータ故障時の可能な飛行状態を仮想環境内で確認し、評価することを目指しています。2026年7月以降に予定している活動としては、実機仕様に基づくドローンモデルの構築やロータ特性の算出、PIDチューニング、故障シナリオの注入方法、さらには故障ケースに対する制御ロジックの評価方法を段階的に整理する予定です。
箱庭ラボは、「現実の前に、失敗できる世界をつくる」という理念のもと、物理シミュレーション、制御、組込みソフトを結びつける分散シミュレーション基盤「箱庭」を通じて、ドローンに関する安全性向上と検証作業の効率化に貢献していく方針です。
関与する関係者の声
湘南工科大学の岡崎秀晃教授は、次のようにコメントしています。「マルチロータ型ドローンにおけるモータ故障時の挙動や制御可能性は、ドローンの安全性を考える上で重要な研究課題です。今回、箱庭ラボによる仮想環境での検証は、研究成果を実社会に結びつける重要なステップです。」
結論
本取り組みは、今後のドローン開発における安全性評価や制御技術の向上につながる期待が寄せられています。科学と技術の融合が新たな可能性を引き出し、安全かつ効果的なドローン運用の道を切り拓く手助けとなるでしょう。
会社情報
- 会社名
- 合同会社箱庭ラボ
- 住所
- 福井県福井市問屋町3丁目111番地
- 電話番号
トピックス(科学)


【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。