




生成AIが変える産業用ロボットの未来、直感的操作の実現へ
生成AIを活用した新しい産業用ロボット制御システムの研究
1. はじめに
産業用ロボットの進化は、製造業の生産性を大きく向上させてきました。しかし、その普及には熟練オペレータの不足や自動化技術への柔軟な適応が求められています。そこで注目を集めているのが、株式会社チトセロボティクスが開発を進める「自然言語動作指示システム」です。これは、大規模言語モデル(LLM)と視覚言語モデル(VLM)を利用し、簡単な日本語の指示と画像だけでロボットを操ることを目指しています。
2. 研究の背景
近年、産業用ロボットは製造現場で欠かせない存在となっていますが、従来の教示方法には限界があります。特に、環境の変化や多品種生産への対応が難しく、オペレータのスキルに依存してしまう側面がありました。このような背景の中、生成AIの技術に期待が寄せられています。自然言語や画像から指示を理解し、自動的にプログラムを生成することで、従来の作業工数を大幅に削減することが可能になるのです。
3. 研究の概要
3.1 自然言語と画像入力
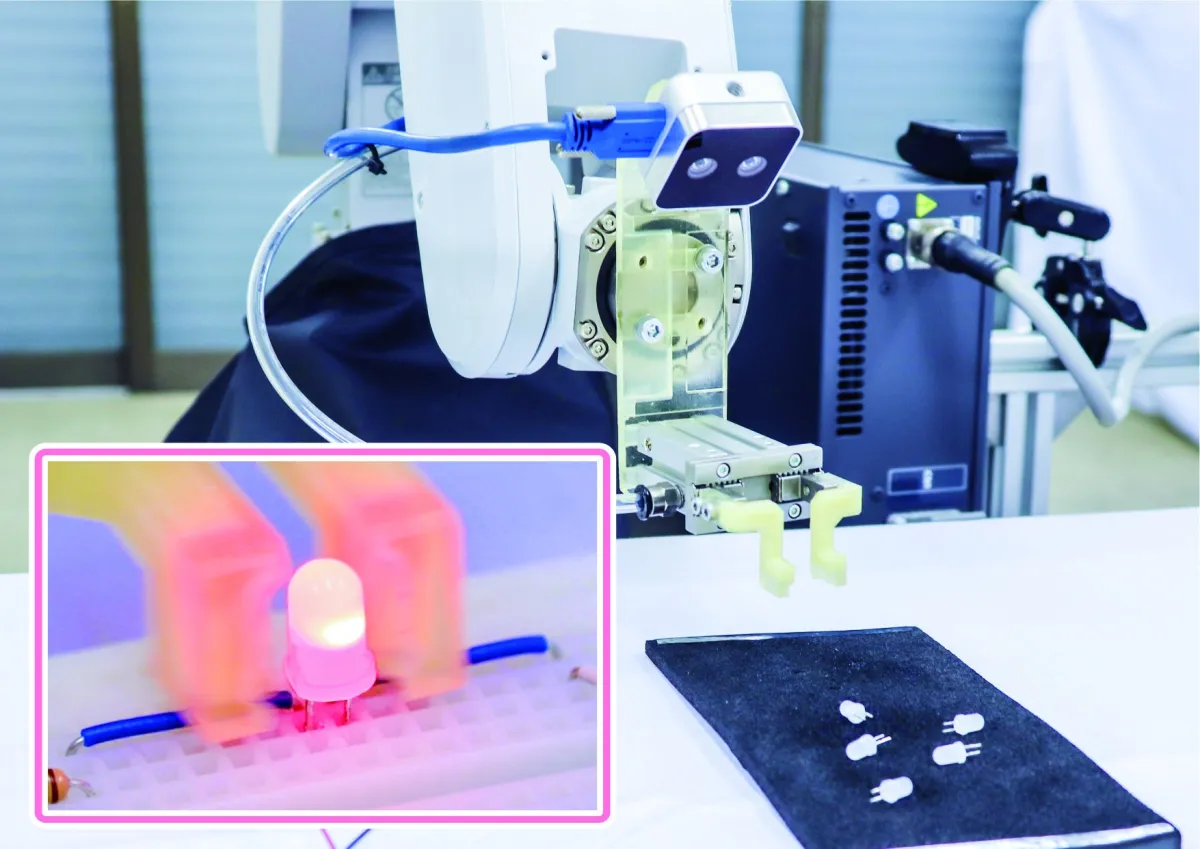
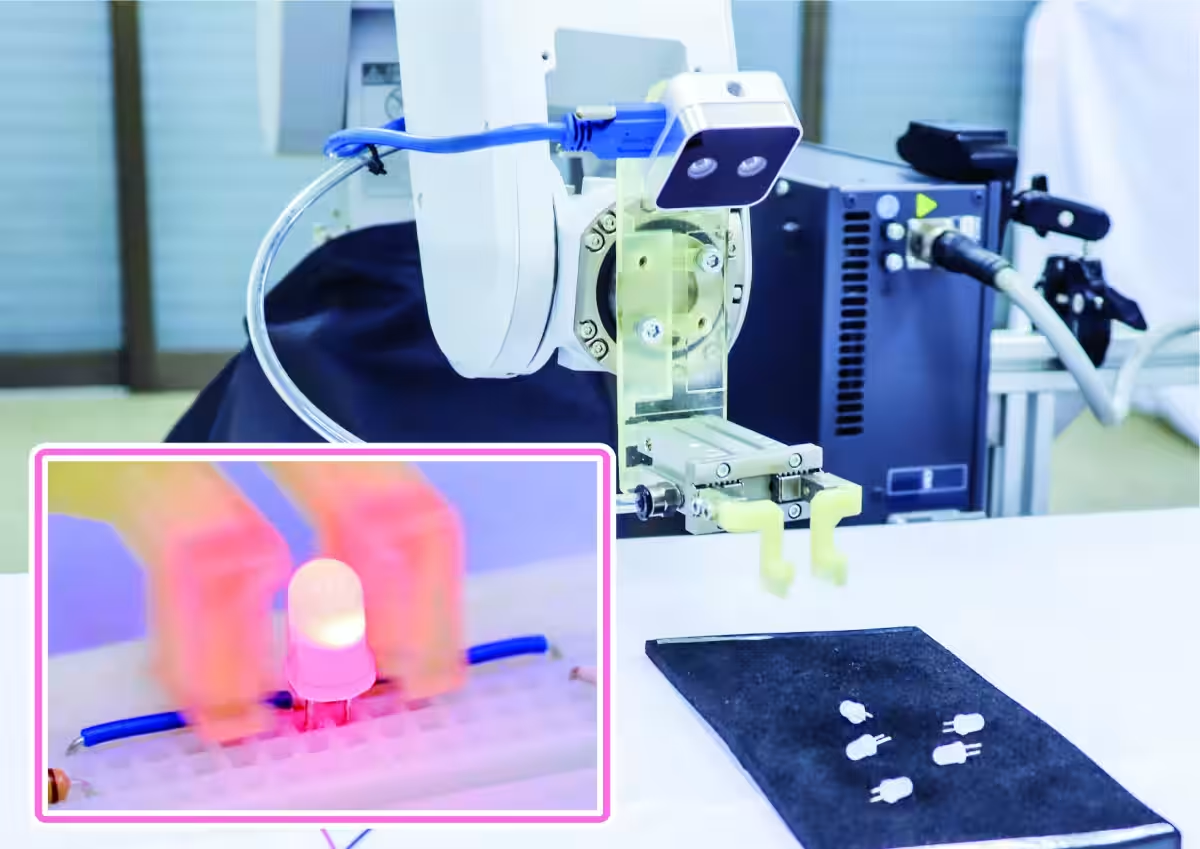
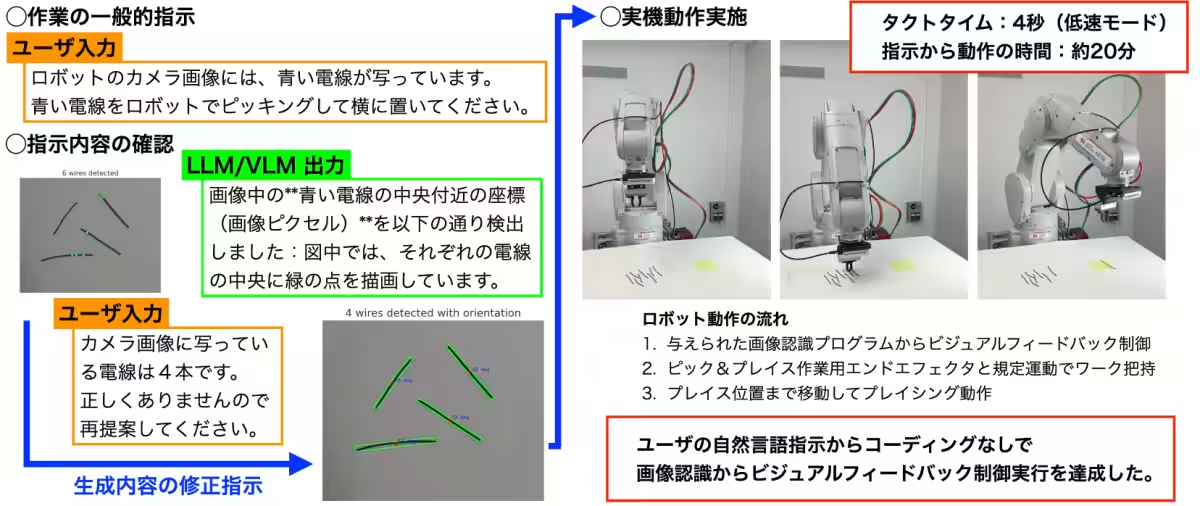
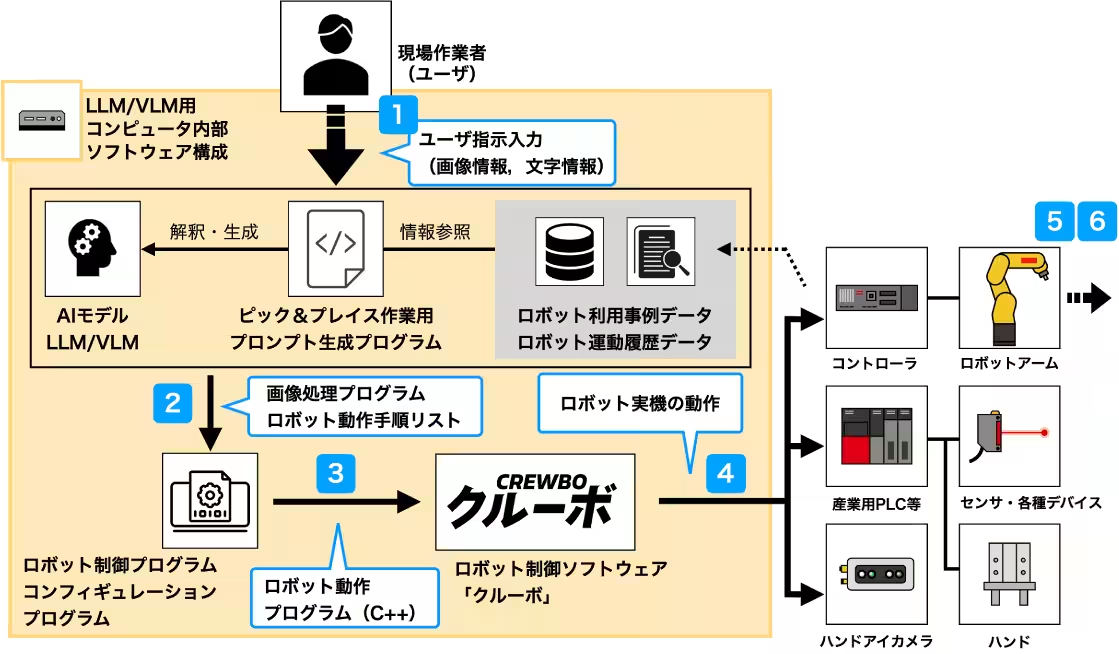
システムにおいては、ユーザーが例えば「青い電線をピッキングして横に置いてください」といった自然言語で指示を出し、対象物の画像をアップロードします。これにより、ロボットは具体的な動作を学びます。
3.2 タスクの解釈
次に、受け取った指示を大規模言語モデルと視覚言語モデルが解釈し、必要な処理を自動生成します。例えば、対象物を認識するためのコードやロボットの動作命令が作成されます。
3.3 プログラム生成と実行準備
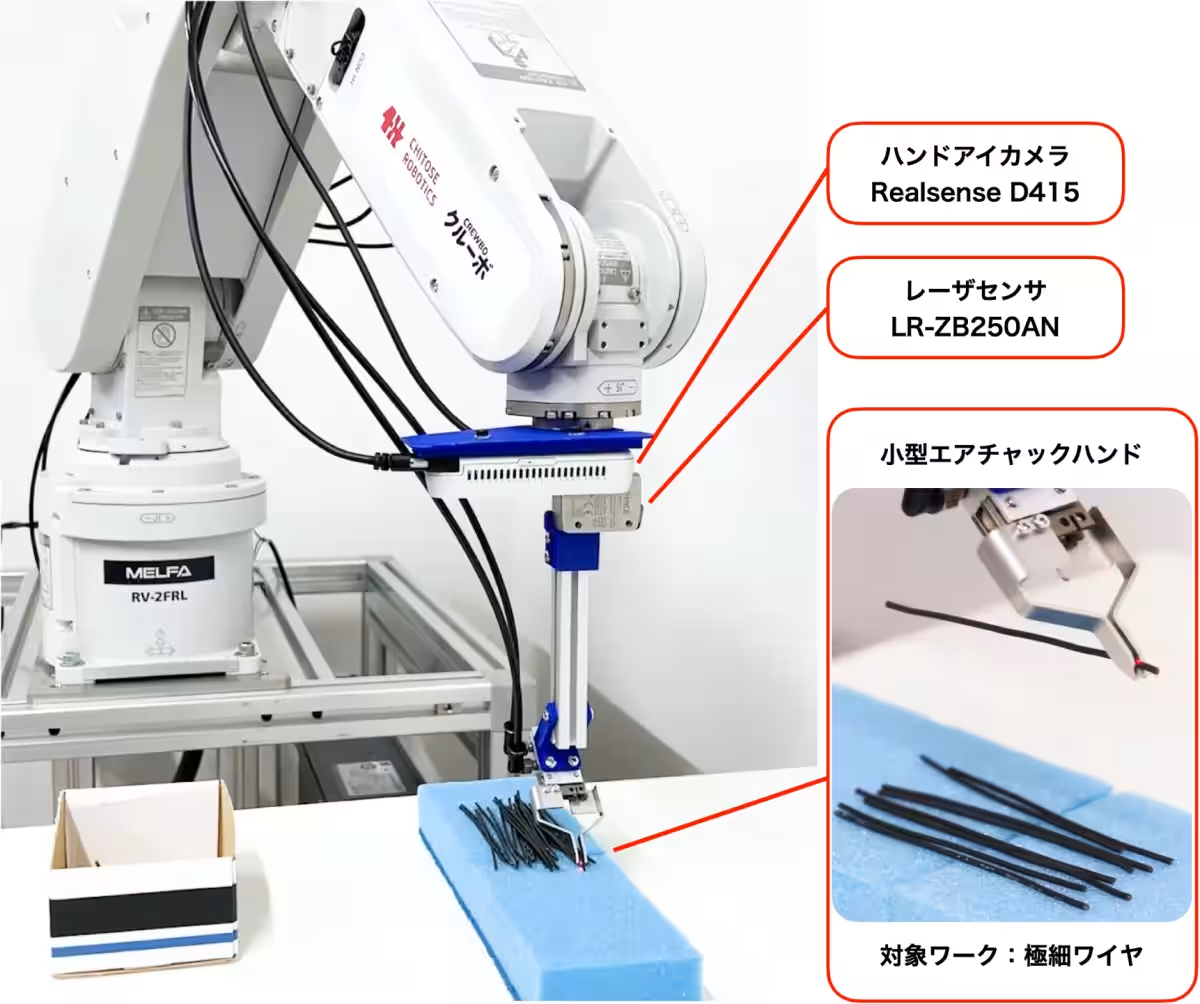
生成されたプログラムは、チトセロボティクスのロボット制御ソフト「クルーボ」と連携し、実際のロボットに適用されます。このシステムは、環境に応じた動作が可能で、キャリブレーションを必要としない特徴を持ちます。
3.4 ビジュアルフィードバック制御
動作実行時には、ロボットに搭載されたカメラ画像を利用してリアルタイムで位置補正を行い、高精度な作業を実現します。これにより、0.02mm以下の精度での作業が可能になり、従来の手法よりも遥かに高い柔軟性と精度を誇ります。
4. 研究の成果と展望
この新システムは、コーディング不要であり、自然言語の入力だけで操作が可能なため、オペレータのハードルが大きく下がります。また、ビジュアルフィードバック制御によって、作業のスピードも向上し、実際の動作完了までの時間が短縮されます。さらには、様々な業種や場面においての拡張性も高く、将来的には複数エンドエフェクタとの連携や、自動化可能な工程の幅を広げることが期待されます。
5. チトセロボティクスのビジョン
チトセロボティクスは、「人とロボットが自然に協働し、それぞれの強みを活かせる未来の働き方」を実現することを目指しています。ロボットが繰り返し作業や精密な操作を担い、人間が創造的な業務や判断を行うことで、持続可能で豊かな社会の実現に貢献することを掲げています。
6. まとめ
今回の研究により、生成AIと産業用ロボットの新たな連携の可能性が広がりました。自然言語による直感的な操作方法は、今後の自動化の一般化を促進し、多くの現場での生産性向上に寄与するでしょう。チトセロボティクスが描く未来には、技術と人とのより良い関係が構築されることが期待されます。
会社情報
- 会社名
- 株式会社チトセロボティクス
- 住所
- 東京都文京区春日2-19-1
- 電話番号
- 03-5615-8271
関連リンク
サードペディア百科事典: 東京都 文京区 株式会社チトセロボティクス 自然言語動作指示システム クルーボ
Wiki3: 東京都 文京区 株式会社チトセロボティクス 自然言語動作指示システム クルーボ
トピックス(IT)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。