





デンソーが導入した多品種ワーク対応の柔軟指ロボット技術
デンソーが導入した「ラティス構造柔軟指」とは
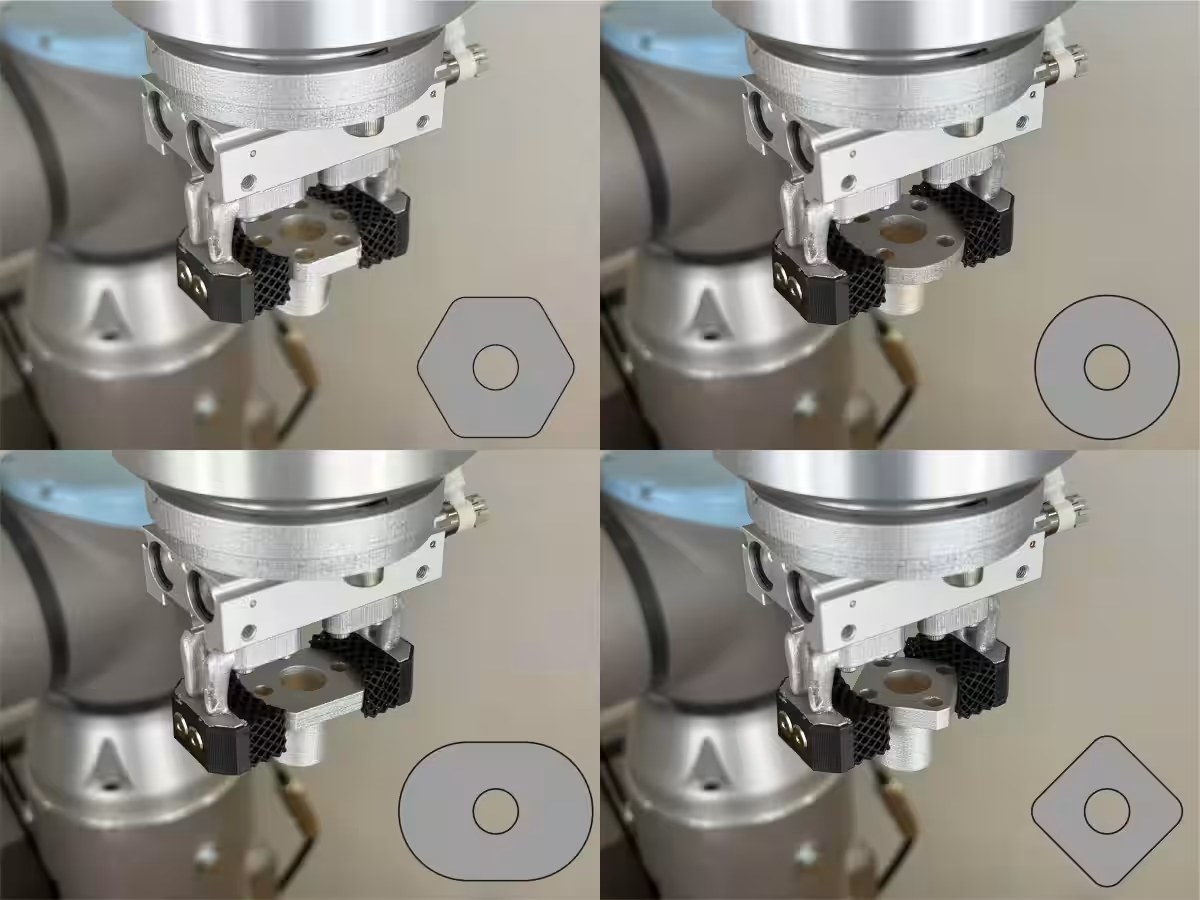
株式会社デンソーは、北九州発のスタートアップであるキックロボティクス株式会社が提供する「ラティス構造柔軟指」を導入しました。この技術は、異なる形状の多品種ワークを効率的にハンドリングできる新しいロボットのソリューションです。具体的には、フィンガの段取り替えやツールチェンジを行うことなく、複雑なワークを取り扱えるという特長を持ち合わせています。
導入前の課題
デンソー西尾製作所では、既存の搬送ラインにおいて以下のような課題を抱えていました。
1. 形状のばらつき: 複数のワークがさまざまな形状を持つため、従来のフィンガでは安定した把持が難しい。
2. サイクルタイムの増加: フィンガの段取り替えが必要なため、そのたびに作業が遅れる。
3. 可搬重量の制約: 形状可変機構付きのフィンガを使う場合、ロボットが取り扱える重量を超えてしまうことがある。
これらの問題を解決するため、デンソーは「柔軟指」を採用することに決めました。
「柔軟指」の選定理由
この新たな技術を選び取った理由は、以下の通りです。
1. 高い形状適応性: 多様な形状のワークでも安定した把持が可能。
2. 簡単な導入: 既存のフィンガに被せる形で使用でき、フィンガの段取り替えや機構変更が必要ない。
導入による効果
「柔軟指」を導入したことで、形状が異なるワークをより安定してハンドリングできるようになりました。また、60万回程度の繰り返し動作に耐えることができ、交換の手間を省ける点も大きな利点です。これにより、従来の運用方法とは一線を画す効率的な生産ラインの構築が期待されています。
「柔軟指」の特長
「柔軟指」は、ラティス構造と呼ばれる立体のグリッドで構成されており、3Dプリンタで造形可能な複雑な形状を持ちます。この構造により、「やわらかさ」と耐久性を両立させることができ、様々な形状をしっかりと把持することが可能です。
高い耐久性
強度ある素材を使用し、適切に変形を調整することで、長期間にわたって使用できる耐久性能が得られています。具体的には、周囲の温度や湿度、物理的な衝撃にも耐えうる設計が施されています。
設計自由度の高さ
3Dプリンタを活用することで、特定のニーズに応じたさまざまな形状の「柔軟指」を製造することが可能です。顧客の要求に基づいて、柔軟に設計が変更できるため、今後の利用シーンが多岐にわたることでしょう。
把持試験サービスおよび構想・見積りサービス
キックロボティクスでは、把持試験サービスを提供しています。これは、実際のワークを用いて、把持の可否や安定性を評価できるサービスで、導入の際の不安を払拭します。
また、顧客が使用中または使用予定のハンドやワーク情報をアップロードすることで、「柔軟指」のイメージ図と概算価格を提示する構想・見積りサービスも行っています。
会社概要
キックロボティクス株式会社は、2019年に設立され、本社を北九州市に構えています。代表の滝本氏は、今後のさらなる技術革新とサービス展開に意欲を示しています。
このように、デンソーとキックロボティクスの協力によって、製造業において新たな時代が開かれることが期待されています。今後の展開に目が離せません。




会社情報
- 会社名
- KiQ Robotics株式会社
- 住所
- 福岡県北九州市小倉北区浅野1-1-1ビエラ小倉1階DISCOVERY
- 電話番号
- 093-482-4622
トピックス(エンタメ)



【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。