
フィジカルAIの未来を切り開く!KiQ Roboticsの柔軟指の革新技術




フィジカルAIの未来を切り開く技術
株式会社KiQ Robotics(福岡県北九州市、代表取締役: 滝本 隆)は、「ラティス構造柔軟指」と呼ばれる革新的なロボットハンドツールを活用し、フィジカルAI分野での研究開発に取り掛かっています。この柔軟指は、製造現場の多様なニーズに応えるために設計されたもので、物体をつかむ際の安定性を高め、労働生産性を向上させることを目的としています。
フィジカルAIの重要性
近年、フィジカルAIへの関心が高まっています。それは、ロボットが物体を扱う際、AIによる認識や動作計画だけでは実際の作業には不十分であることに起因しています。実際の現場において、ロボットが対象物を安定的に掴むためには「最後の接触」が大きな鍵となります。この最後の接触での正確さがなければ、たとえAIが物体を認識し、適切な行動を計画しても、仕事は成立しないのです。そこで、KiQ Roboticsは、柔軟指の持つ物理接触の特性を最大限に活用し、その接触が安定することで、フィジカルAIの分野での課題を解決することを目指しています。
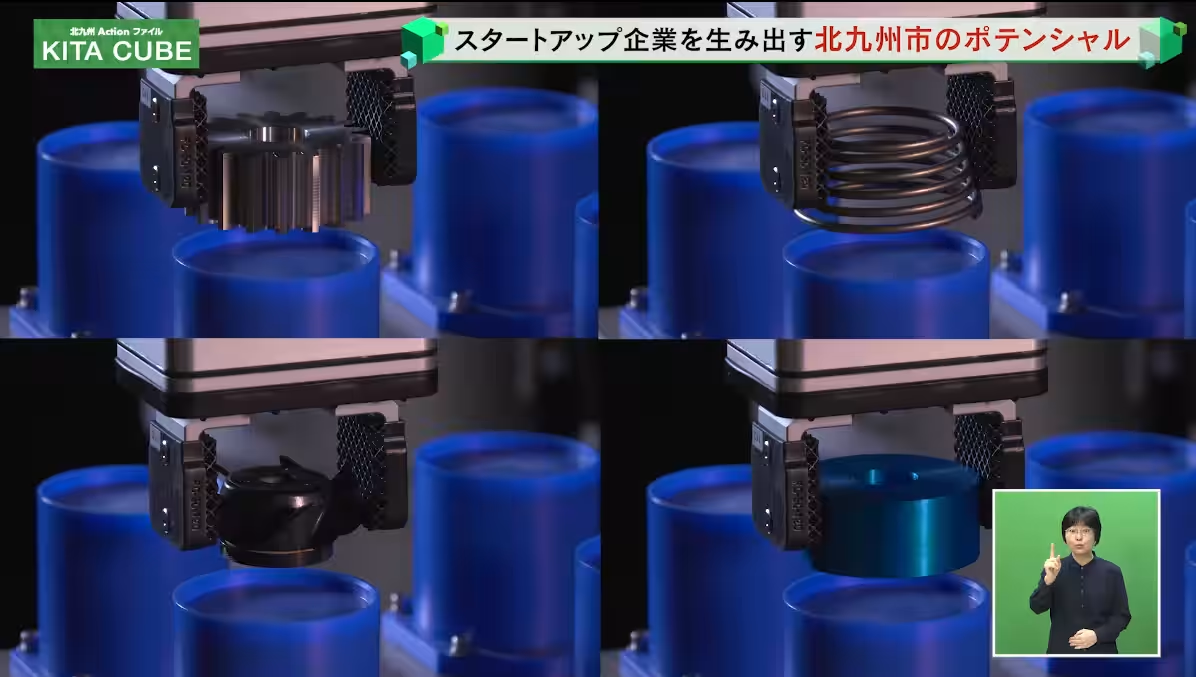
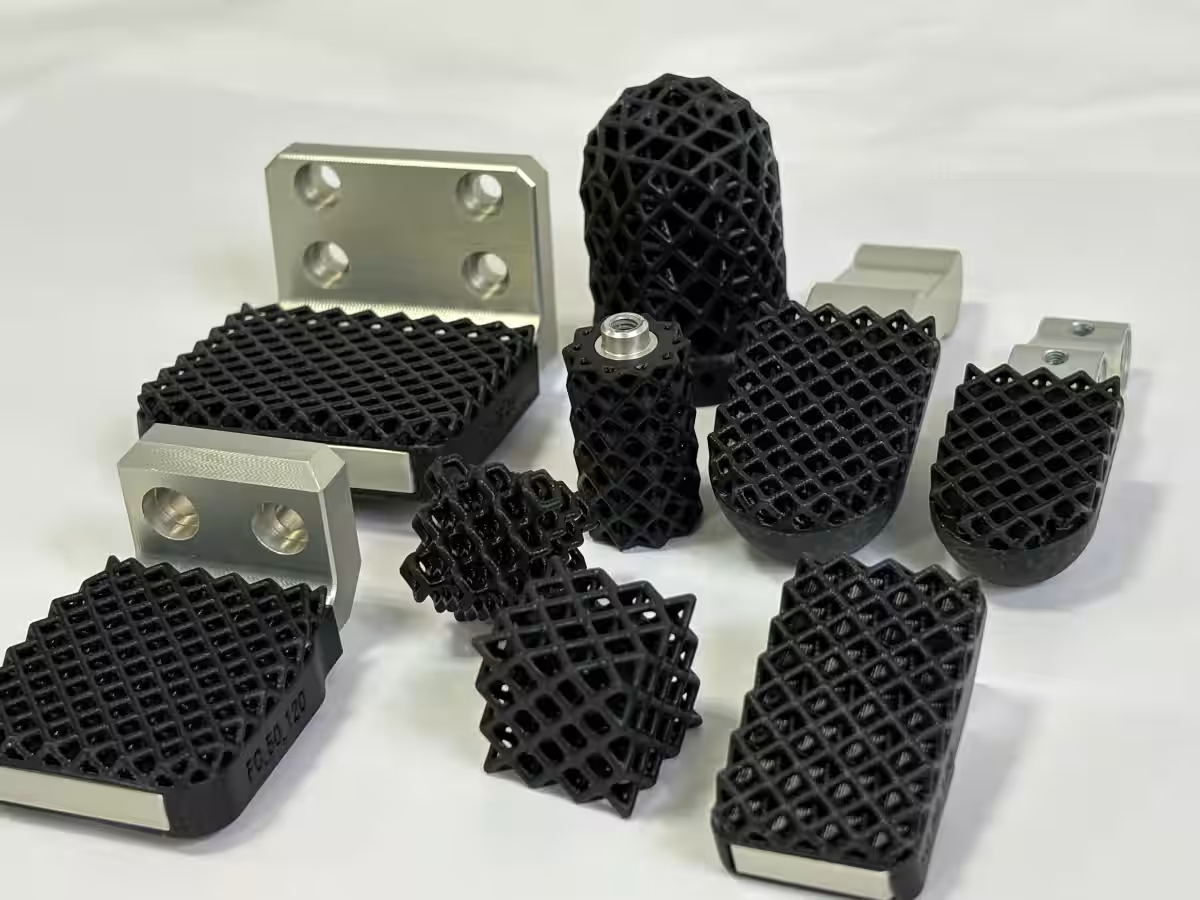
柔軟指の革命的な特長
柔軟指は、ラティス構造によって形成された柔らかい指先が特徴です。これにより、実際に対象物の形状に沿って変形し、面接触で物体を支えることが可能です。この技術は多品種ワークの搬送や段取り替えの削減、さらにはワークの傷を防ぐことにも寄与しています。特に、多品種・少量生産を行う業界においては、その流動的な特性が大きく評価されています。
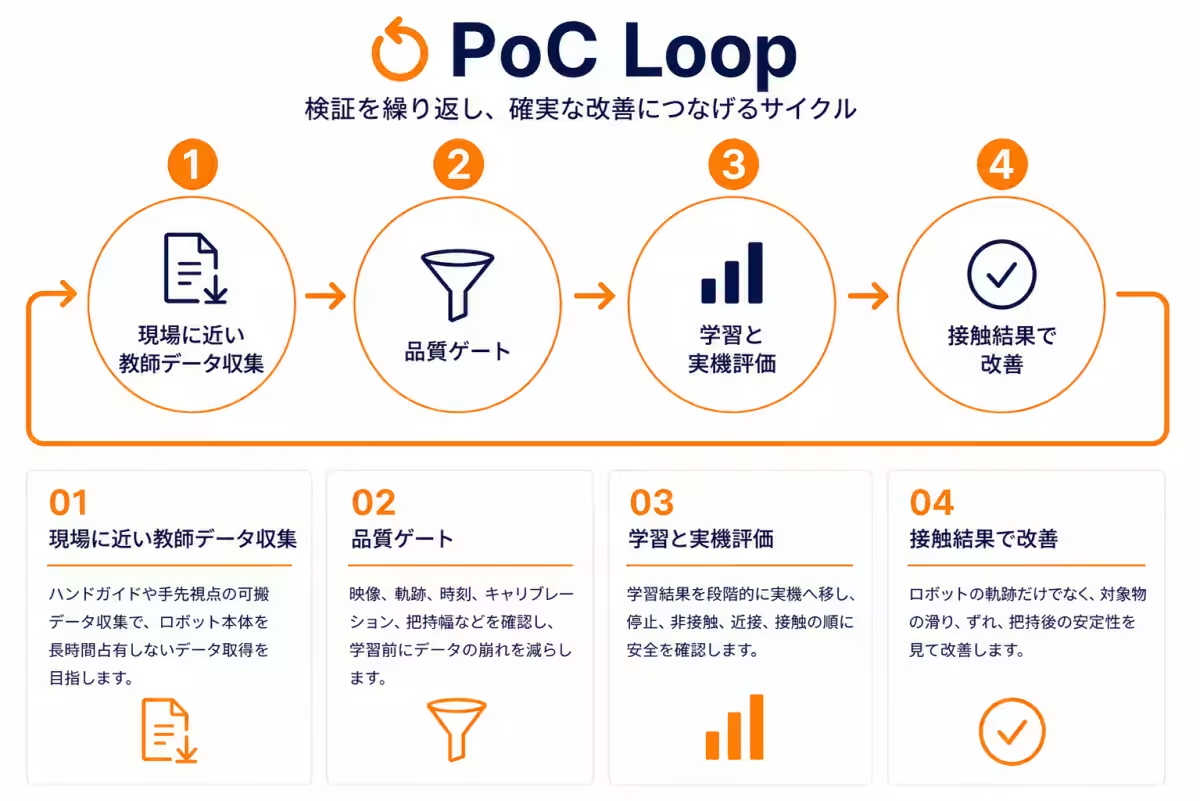
研究の推進と実証事例
KiQ Roboticsは、公開研究「Universal Manipulation Interface(UMI)」を基にした開発を進めています。この考え方は、ロボット本体を使用せずに人の作業データを収集し、そのデータを基に実機へ転移させるもので、現場での実証が容易になります。また、九州工業大学の田向研究室でも柔軟指が活用され、家庭用サービスロボットによるデータ収集が行われています。このように、理論と実践の両面からフィジカルAIを構築していくことが期待されています。
将来の発展の方向性
短期的には、柔軟指が実際の接触時に位置ずれや姿勢ずれをどのように処理できるかを検証し、AI制御との組み合わせによってどのような作業条件が必要となるかを明らかにしていきます。また、中長期的な目標としては、公開されたロボット基盤モデルや新たな模倣学習手法との比較・活用を進め、産業現場で使える技術基盤を整え、継続的な研究を行います。
まとめ
KiQ Roboticsの「柔軟指」は、単なるロボットハンドツールとしてのみならず、フィジカルAIの新たな接触インターフェースとしての役割を担っています。今後もこの技術を活かし、さまざまな産業現場での課題解決に取り組み続けることでしょう。新たな技術革新がもたらす未来に期待が高まります。


会社情報
- 会社名
- KiQ Robotics株式会社
- 住所
- 福岡県北九州市小倉北区浅野1-1-1ビエラ小倉1階DISCOVERY
- 電話番号
- 093-482-4622
トピックス(エンタメ)







【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。