




四足歩行ロボットが山岳トンネルの安全性を向上させる取り組みを実施
未来の建設現場を変える四足歩行ロボットの挑戦
株式会社ポケット・クエリーズと株式会社鴻池組は、山岳トンネル建設の最前線である切羽での自律探査を四足歩行ロボットを用いて実施しました。この実証実験は、2026年2月8日に行われ、施工現場における危険環境下でのロボットの可能性を探求するものでした。
暗闇の先で何が起きているのか
山岳トンネルの切羽とは、掘削最前線のことであり、非常に危険な作業環境です。人間は通常、発破後の崩壊やガスの危険性などから立ち入ることができません。しかし、四足歩行ロボットがこの領域で無人探査を行うことで、事前に状況を把握でき、危険が去った後の作業を容易にします。
安全な探査の実現
今回、四足歩行ロボットは自律走行と遠隔操作により、厳しい凹凸のある不整地でも移動し、危険エリアへの無人探査を成功させました。この成果により、危険エリアに人が入る前にロボットが状況を確認する体制が構築されました。
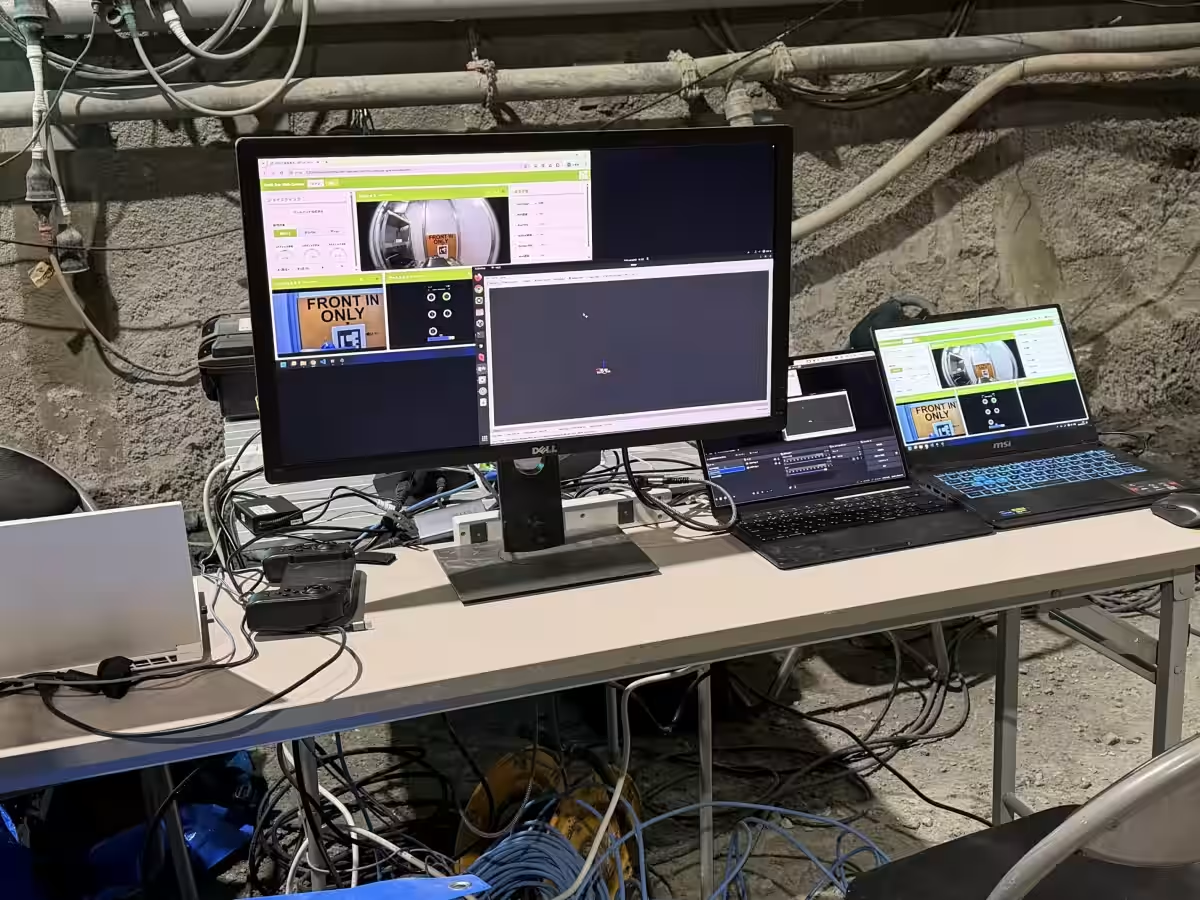
リアルタイムモニタリング
さらに、ロボットに搭載されたガス検知センサーは、切羽近くの酸素濃度や可燃性、有毒ガスの有無をリアルタイムでモニタリングしました。このデータは安全性の判断に役立ち、状況に応じた迅速な入坑判断を可能にします。
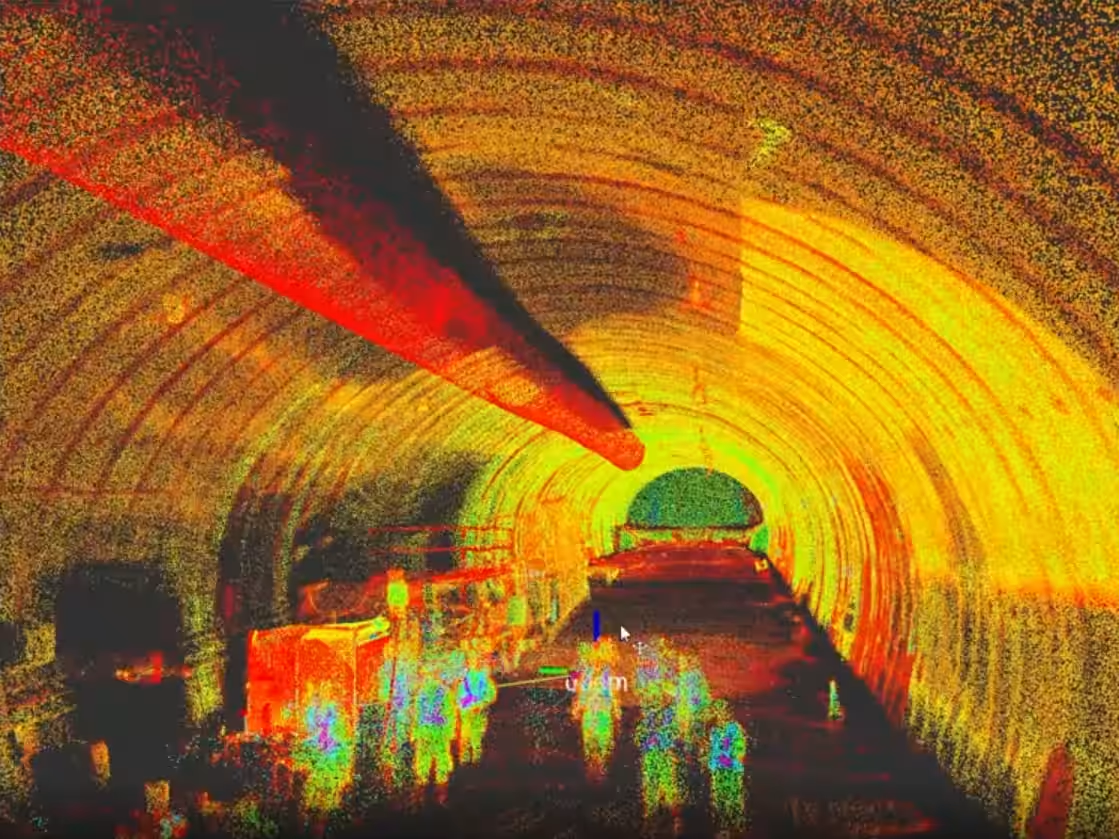
高精度なデータ取得
ロボットは、LiDAR技術を利用して切羽と坑道の3D点群データを高精度で取得しました。このデータはBIM/CIMモデルとスムーズに連携できるため、施工管理のデジタル化と形状変化のモニタリングに寄与しています。
今後の展望
今回の実証実験を通じて、幾つかの技術的課題が浮き彫りになり、さらなる開発の必要性が明確になりました。今後の取り組みとして、以下の点に力を入れます。
複雑な地形への適応
地山崩壊後の過酷な環境でも、四足歩行ロボットの歩行安定性を向上させ、より多様な現場に対応できるようにします。
長時間運用の実現
継続的な稼働時間を向上させ、通信の安定性を高めることで、自律パトロールを広範囲で実施できるように目指します。
BIM/CIMとの連携自動化
取得した点群データを基に、施工進捗を自動で解析するアルゴリズムの実装を進め、建設現場の効率化を図ります。
未来へ向けた一歩
ポケット・クエリーズと鴻池組は、このプロジェクトを単なる実証実験に止めることなく、建設現場における安全性と生産性を根本から変革するための技術開発を続けていきます。四足歩行ロボットが危険な場所での作業を肩代わりすることで、作業者はより安全な環境で創造的な意思決定に集中できるようになります。将来の建設現場の実現に向け、両社は確かな一歩を踏み出し続けます。


会社情報
- 会社名
- 株式会社ポケット・クエリーズ
- 住所
- 東京都新宿区西新宿3-20-2東京オペラシティタワー52F
- 電話番号
- 03-5333-1533
トピックス(エンタメ)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。