




フィジカルAIの現場適応を目指す新技術の研究開発を推進するDTRI
デジタルツイン総合研究所が提案するフィジカルAIの革新
株式会社デジタルツイン総合研究所(DTRI)は、AI技術の新たな進展を目指し、フィジカルAIの普及に向けて自律進化型AIアルゴリズムの研究開発を加速しています。この技術の核となるのは、AIが自ら環境に適応し、不足情報を見極め、取り入れることができる仕組みです。これにより、実際の産業現場でのフィジカルAIの導入が実現可能になると期待されています。
フィジカルAIと現場適応の課題
フィジカルAIとは、実際の環境を理解し、判断し、行動する能力を持つAIです。しかし、ロボットやAIが産業現場に適用される際には、現場ごとに異なる環境への適応が大きな課題となります。工場や倉庫、災害対応現場では、照明や配置、作業手順、さらには人的オペレーションまで様々な要因が影響します。
従来は、専門家が手作業でデータを収集し、環境を構築する必要がありました。DTRIは、この「最後の1マイル」にかかるコストがフィジカルAIの普及を妨げていると考えています。
自律進化型AIアルゴリズムの革新
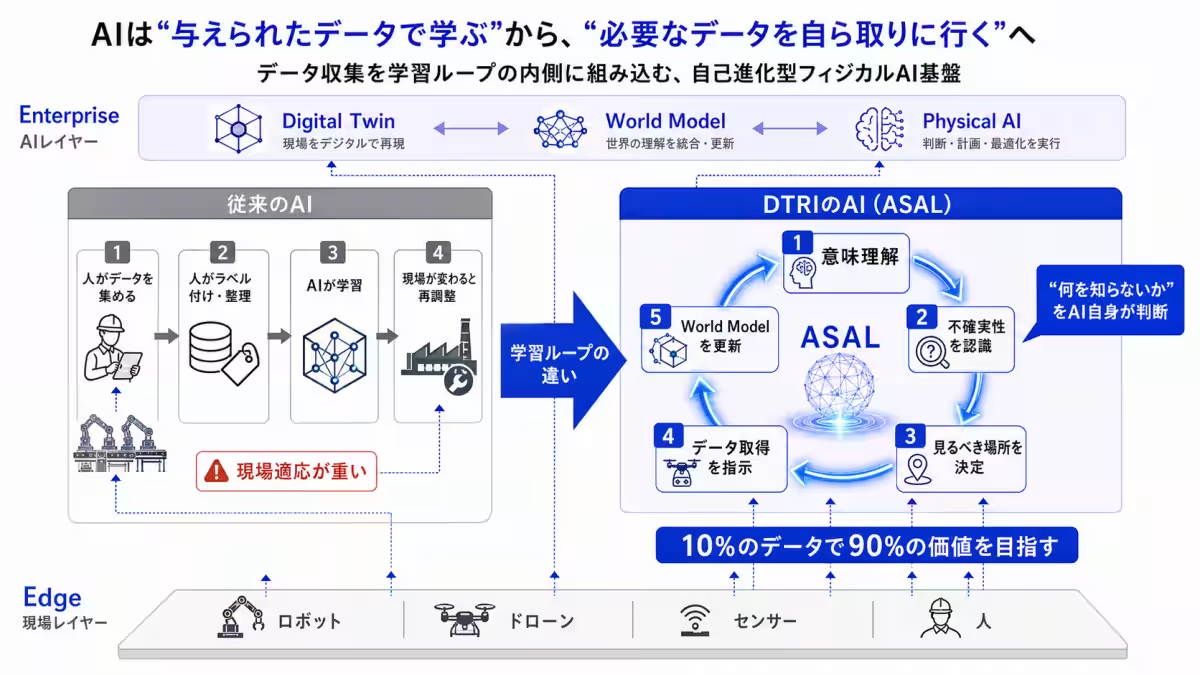
DTRIの研究チームは、従来型のAIがデータを与えられて学ぶだけでなく、自らの理解不足を認識し、必要な情報を判断する能力を目指しています。このアルゴリズムは、以下のステップに基づいています。
- - 環境理解の確認:AIが自らの認識不足を見つける。
- - データ取得指示の生成:不足している情報を埋めるための観測地点や視点を特定する。
- - 継続的な更新:取得した情報を基に、デジタルツインや世界モデルを更新する。
このような技術により、AIは未知の環境にも柔軟に対応でき、運用コストを大幅に削減することが可能になるとDTRIは期待しています。
研究開発の進捗と応用領域
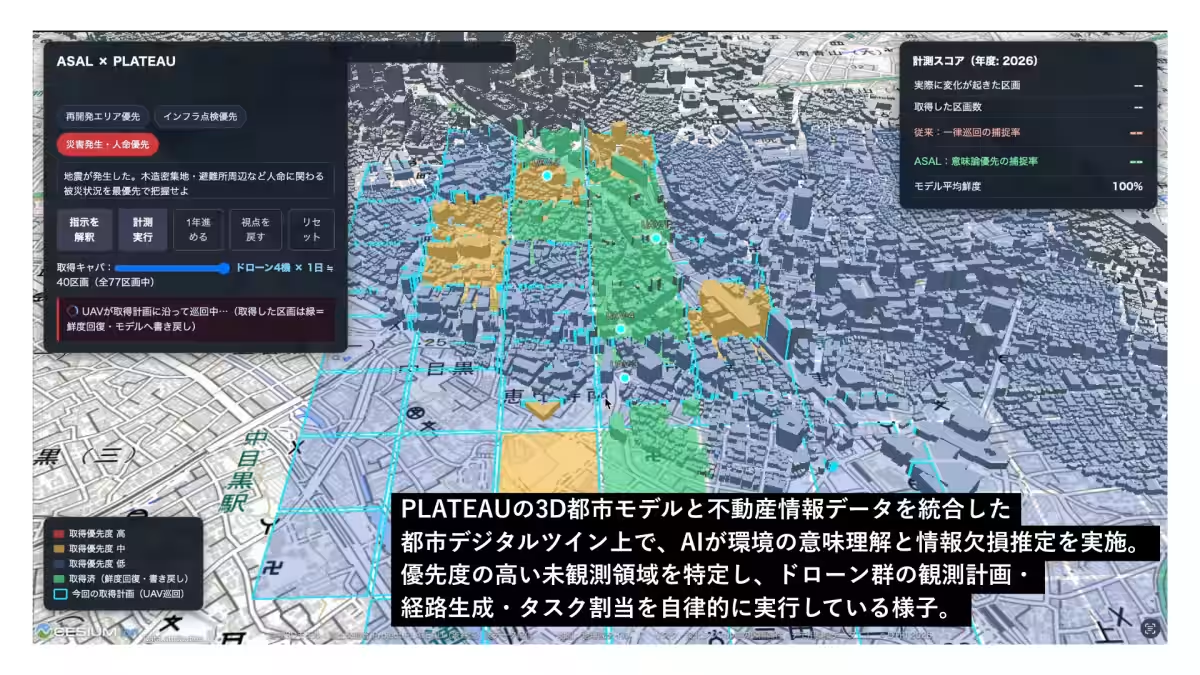
現在、DTRIは「ASAL(Active Site Acquisition Loop)」というフレームワークの下、AIが環境理解の不足を発見し、必要な情報を取得する自己改善型のフィジカルAIの初期実装を進めています。初期検証では、2次元環境でロボットが観測地点を特定する行動を生成する能力が試されています。今後はこの技術を3次元環境に拡張し、より複雑な実環境での検証を行う予定です。
本技術は、製造業、物流、インフラ、災害対応、防衛といった、多様な場面での応用が考えられています。現場の状況に応じて自律的に情報を取得し、更新することができるため、変化する環境に対しても対応可能です。
フィジカルAIの未来
会社情報
- 会社名
- 株式会社デジタルツイン総合研究所
- 住所
- 島根県雲南市加茂町加茂中1191
- 電話番号
トピックス(その他)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。