
ローカル5Gを駆使した四足歩行ロボットの点検実証実験が都立大で実施!




ローカル5Gを活用したインフラ点検ソリューションの実証実験
千葉県に本社を構える株式会社Liberawareが、東京都が推進する「Tokyo NEXT 5G Boosters Project」の一環として、ローカル5Gの環境で四足歩行ロボットを使用した実証実験を実施しました。これは、東京都立大学が提供する実験フィールドを活用した重要な取り組みであり、社会インフラの老朽化や人手不足の解決を図るものです。
実証実験の背景と意義
社会構造が変わる中で、特にプラントや発電所、地下設備などのインフラ保守において、点検業務の安全性や効率性が求められています。安全に点検を行えるロボット技術を活用することで、人の手が届かない危険な場所での業務を軽減することが期待されています。Liberawareは、危険な場所でのドローン利用が得意であり、TIS株式会社との連携によって、ITの力を融合させた点検業務のDX(デジタルトランスフォーメーション)を進めています。
実証実験の詳細
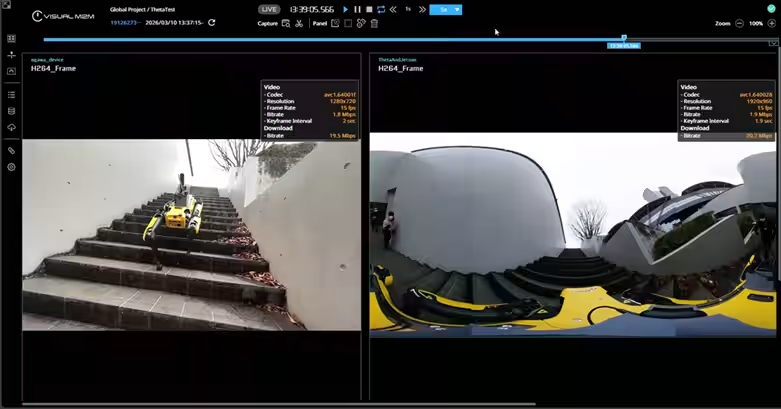
今回の実験では、東京都立大学の広大なフィールドの中で、ローカル5Gを活用した通信環境を整え、四足歩行ロボットの性能を検証しました。具体的には、四足歩行ロボットが屋内外の環境や階段などを自律走行し、有効なデータを収集する能力を確認しました。
検証結果のハイライト
1. ロボットの走行性能 - ロボットは多様な障害物が存在する中でも安定した走行を実証し、点検作業に適用できる可能性を示しました。
2. データの妥当性 - ロボットによって取得されたデータは、人的に撮影したものと比較しても高い信頼性があることが確認されました。
3. 通信環境の確認 - ローカル5Gを利用した通信環境下でも安定したデータ収集が行えることが判明し、次世代通信技術の優位性を示しました。
4. データ統合と可視化 - 取得したデータは、アプトポッドの「intdash」を用いて統合・可視化され、リアルタイムでの状況把握が可能となりました。
今後の展望
この実証実験は、今後も継続され、実運用に向けた具体的なサービスモデルが構築される予定です。目指すは、点検業務の効率化のみならず、電力、建設、公共インフラなど、幅広い分野への応用です。この取り組みが成功すれば、社会インフラの維持や管理がより高度化され、安全で快適な社会の実現につながるでしょう。
まとめ
ローカル5G通信技術を活用したインフラ点検ソリューションは、期待が高まる領域です。Liberawareの取り組みは、次世代のインフラ管理の形を示す重要な一歩であり、今後の進展に注目が集まります。東京都が支援するこの事業は、テクノロジーと人の力が組み合わさることで、より良い未来の構築につながる可能性を秘めています。




会社情報
- 会社名
- 株式会社Liberaware
- 住所
- 千葉県千葉市中央区中央3-3-1 フジモト第一生命ビル6階
- 電話番号
- 043-497-5740
トピックス(地域情報)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。