





リアルワールドが新プラットフォーム「All Hands Up!」を発表、ロボットハンドの基準を提供
リアルワールドが取り組むロボットハンドの新たな基準
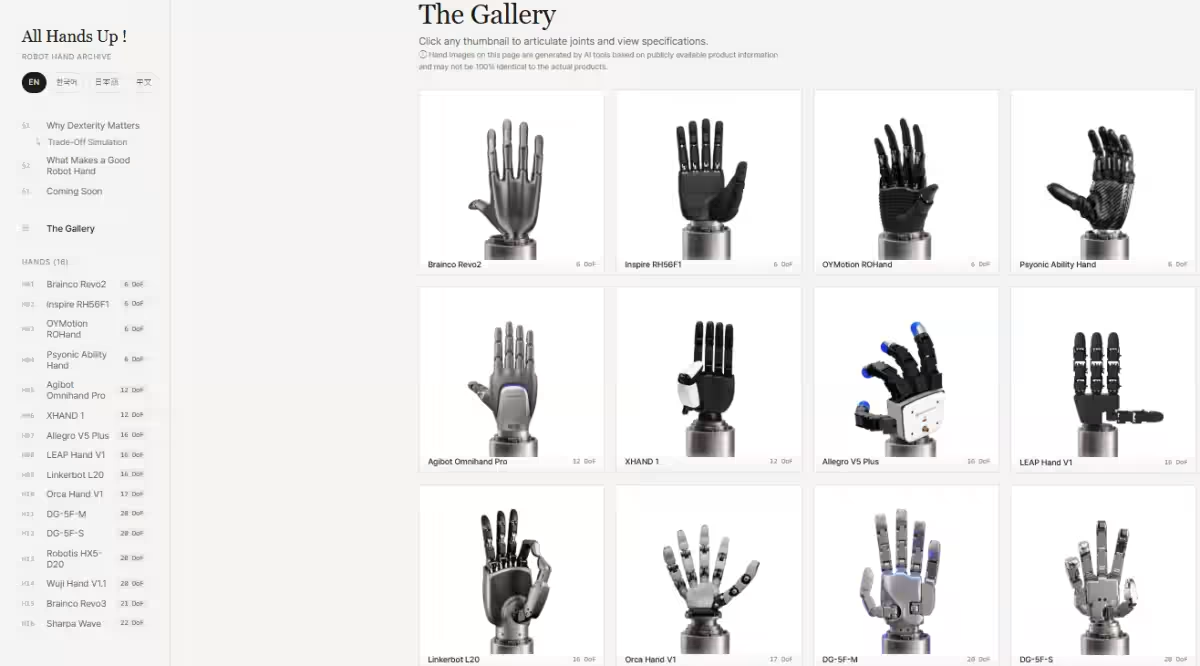
アメリカのリアルワールド(RLWRLD)が、ロボットハンドの実際の動作性能を可視化するための新しいプラットフォーム「All Hands Up!」を発表しました。これは市販されている多関節ロボットハンドの運用データに基づき、設計のトレードオフや限界を整理した技術レポートを提供します。「All Hands Up!」は、ユーザーが各ロボットハンドの性能を簡単に評価できる環境を整え、特に現場での実運用データを共有することを目指しています。
ロボットハンド設計におけるトレードオフ
ロボットハンドはPhysical AIの中核に位置し、様々な産業分野での活用が期待されていますが、デザインと機能の間にはトレードオフが存在することが従来の課題とされています。特に、小型化を進めると把持力が低下する一方、強力な把持力を目指すと逆駆動性が損なわれるなど、それぞれのメリットを同時に実現するのは難しい現状があります。
例えば、ロボットハンドのサイズを小さくすると、内部コンポーネントの縮小が必要となり、その結果、握る強さが不足してしまいます。一方で、ギア比を上げて把持力を強めると、外部の影響に柔軟に対応できない冷静さが失われます。このように、一方を改善しようとすると別の側面に影響を及ぼし、最適なハンドデザインを実現することは非常に困難です。
独自のベンチマーク「DexBench」
リアルワールドは、このトレーダーローレンスに対応するために、地域のロボットハンドとその特性を定量的に評価するための独立したベンチマーク「DexBench」を導入しています。これは、さまざまな設計変数に基づいて、18種類の実世界操作タスクを評価することで、ロボットハンドの実行能力を明確にします。たとえば、親指の可動範囲や指先の関節の独立駆動、最小把持可能径、ハンド外装の摩擦特性などが評価基準として取り入れられています。
ハードウェア二元化戦略
また、完璧なロボットハンドが未だ存在しない現実を踏まえ、リアルワールドは「ハードウェア二元化」戦略を提案しています。このアプローチでは、実施現場向け(Type 1)とAI学習データ収集用(Type 2)の2つのハードウェアタイプを相互補完的に運用することで、各用途に最適なパフォーマンスを実現しようとしています。
使いやすい「URDFベースの可視化機能」
「All Hands Up!」は、URDFというロボットの記述形式を用いたインタラクティブな可視化機能も備えており、ユーザーはWebブラウザ上で複数のロボットハンドを操作し、掴む形を事前に検証することが可能です。これにより、専門的なプログラムを必要とせずに、さまざまなロボットハンドの特性を比較し、理解することができるのです。また、実際のロボットシミュレーションに使用できるURDFデータも提供しています。
リアルワールド代表の展望
リアルワールドの代表・リュ・ジュンヒ氏は「All Hands Up!」を単なる製品比較サイトではなく、ロボットハンド技術の実データを業界全体と共有するオープンプラットフォームとして位置づけています。今後は四半期ごとの定期的な更新を通じて、最新の実証データを蓄積し続ける予定です。
彼は「これにより、メーカーは自社の設計を検証できるだけでなく、研究者や企業パートナーはロボットハンドの導入における明確な基準を得ることができる」と語ります。共通の基準を提供することで、ロボットハンド開発のエコシステムがますます発展することを期待しているのです。
リアルワールドについて
リアルワールドは、2024年に設立されたPhysical AI企業で、人間レベルの動作能力を持つロボティクス・ファウンデーションモデル(RFM)の開発を行っています。本社はアメリカにあり、韓国と日本にも拠点を展開。産業用ロボットのAI技術を牽引し、グローバルなリーダーを目指しています。公式ウェブサイトはこちらで確認できます。

会社情報
- 会社名
- リアルワールド株式会社
- 住所
- 東京都千代田区丸の内1丁目5番1号新丸の内ビルディング9階
- 電話番号
- 03-4530-3160
トピックス(IT)







【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。