



マクニカのPhysical AI検証環境:ロボティクスに新たな風を
マクニカ、Physical AI検証環境を構築
株式会社マクニカ(神奈川県横浜市、代表取締役社長:原 一将)は、最新の技術を駆使してPhysical AI検証環境を構築したと発表しました。この環境は、実際の協働ロボットを用いて仮想空間でのシミュレーション結果を現実のロボティクスに迅速に検証できることが特徴です。これにより、国内におけるロボティクスAIの実装を一層加速させることを目指しています。
Physical AIが実現する未来
近年、自律型の機械(ロボットや自動運転車など)が現実世界を認識し、理解するための技術である「Physical AI」が進化しています。この技術により、Cyber Physical Systems(CPS)が人と協力し、現実の物理空間とデジタル空間がより密接に結びつく未来が見えてきています。特に製造業においては、安全性の強化や生産性の向上が期待されており、危険な環境での作業を自律移動ロボットが担うことで、人命を守ることにもつながります。また、スマートファクトリーやスマートシティの実現を通じて、持続可能な社会基盤の構築が加速されるでしょう。
課題に立ち向かう
しかし、AIとロボティクスの融合には多くの企業がPoC段階でつまずき、本格的な実装まで至らないケースが多いのが現実です。その要因として、AIの学習環境整備の困難さや、データサイエンス人材の不足、急速に進化する技術への適応の難しさなどが挙げられます。これらの課題を解決するためには、検証環境の整備や、現場で実践的なトレーニングを提供することが不可欠です。加えて、企業や研究機関、スタートアップが協力し合うエコシステムの形成も鍵となります。
マクニカの取り組み
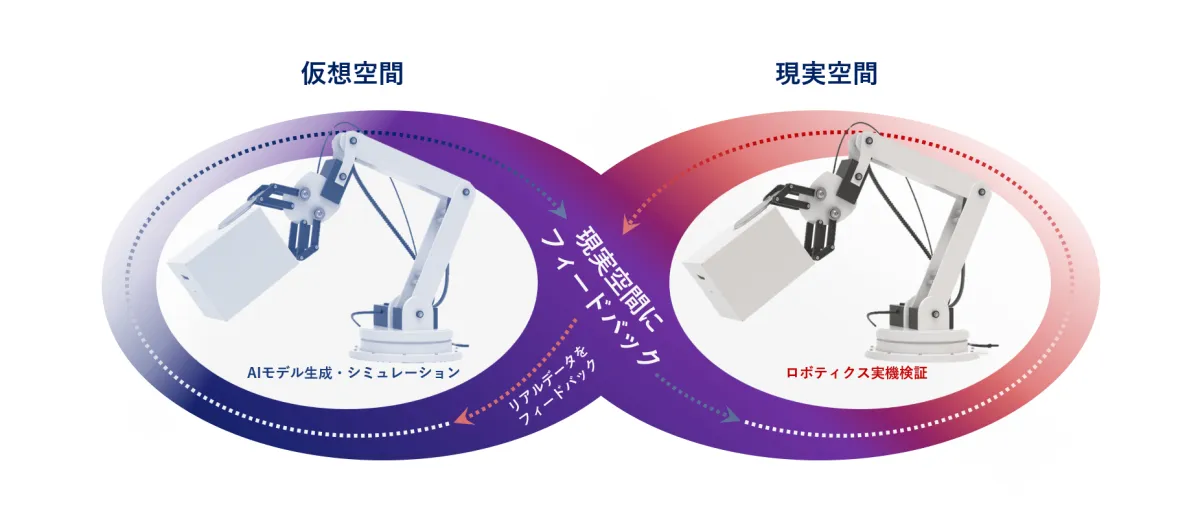
マクニカは、NVIDIAの「3コンピューター ソリューション」を活用し、Physical AI検証環境を自社で構築しています。ここでは、協働ロボットを用いて仮想空間でロボットの学習データを生成し、現実空間でのロボットの動作を検証するプロセスが行われています。
Demo #1:デジタルツイン環境の利用
NVIDIA Omniverseライブラリやオープンソースのロボティクスシミュレーションフレームワーク「NVIDIA Isaac Sim」を用いて、仮想空間に現実の作業環境を再現し、AIモデルの学習に必要なデータを効率よく生成します。これにより、現場でのデータ収集が難しい状況でも安全にデータを取得できます。
Demo #2:データセットの拡張
NVIDIA Cosmos世界基盤モデルを使用して、既存のデータセットに様々な条件やバリエーションを加え、AIモデルの汎用性を向上させます。
Demo #3:経路最適化
NVIDIA Isaac ROSとcuMotionを利用して、ロボットが未知の障害物を回避しつつ最適な経路を瞬時に生成する技術を検証します。
Demo #4:作業精度の検証
NVIDIA Isaac GR00T N1.5を用いて、ロボットのピックアンドプレース作業の精度と安定性を確認します。
今後の展望
今後、マクニカは顧客との共同検証をより活発に行い、パートナー企業とのコミュニティを形成することを目指しています。また、2025年には東京ビッグサイトで国際ロボット展を開催する予定で、Physical AIに関するデモンストレーションを行うことも計画しています。国際ロボット展は2025年12月3日から6日まで開催され、AI技術の実装を進めながら日本社会における新たな価値創造を推進します。
会社情報
- 会社名
- 株式会社マクニカ
- 住所
- 電話番号
トピックス(IT)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。