



物流倉庫のAI活用でピッキングロボットの性能が向上
物流倉庫のAI活用でピッキングロボットの性能が向上
近年、物流倉庫における自動化が進展し、ピッキングロボットの導入が急速に広まっています。しかし、多様な商品の形状や材質により、操作ミスや取りこぼしが頻発し、開発者たちは新しい制御アルゴリズムの開発に苦慮していました。そんな中、リーガルテック株式会社が開発した知財特化AIエージェント「MyTokkyo.Ai」が、ピッキングロボットの制御技術に新しい風を吹き込んでいます。
問題点と解決策
物流倉庫では、商品が多様化しているため、ピッキングロボットによる取りこぼしが増えていました。具体的には、把持方法の判断が複雑で、開発現場ではパラメータの最適化に時間がかかっていました。また、新たな制御アルゴリズムを開発するにあたっては、特許リスクの検証も必要であり、知財対応の負担も増していました。
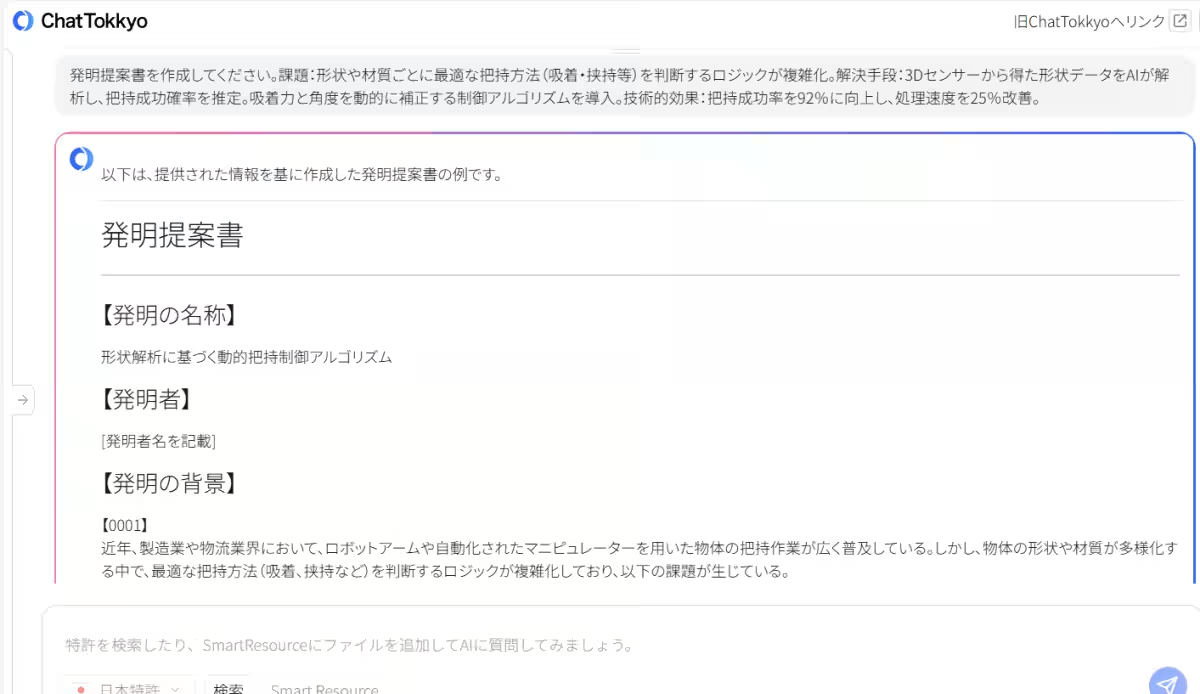
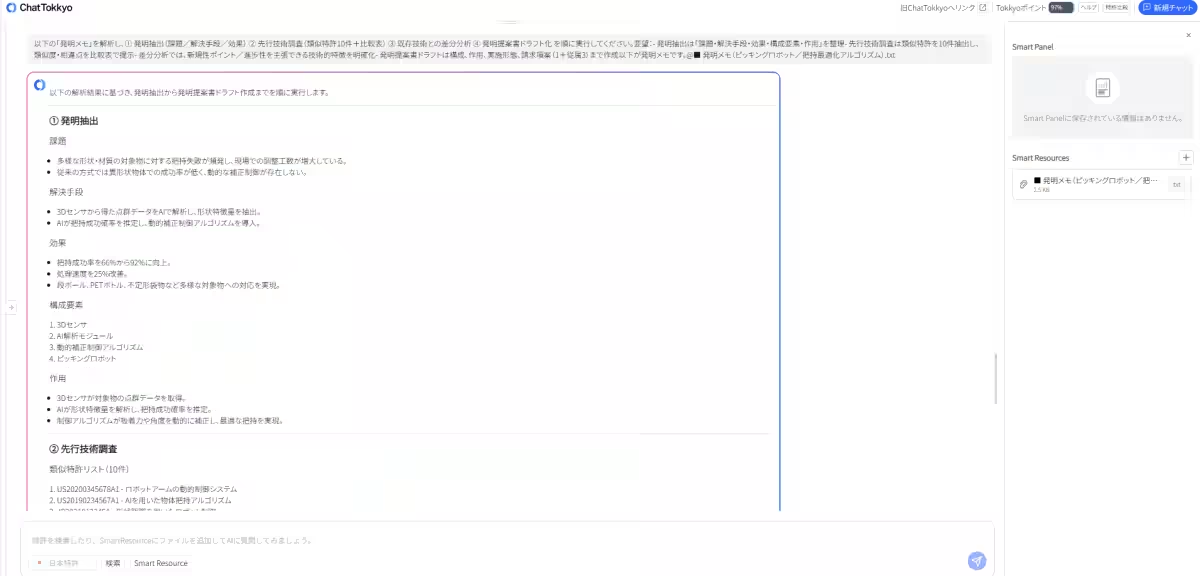
このような課題に対し、MyTokkyo.Aiは試行錯誤の末に得られた実験ログや開発メモから、発明の本質的な要素を迅速に抽出。さらに、先行技術との比較を10秒程度で実施し、特許提案書のドラフトを自動生成するなど、知財部門の負担を軽減しました。
技術の実行
MyTokkyo.Aiは、3Dセンサーから得られる技術情報や把持ログ、制御アルゴリズムに基づき、AIが発明の核となる要素を自動的に抽出します。具体的には、ロボットの把持失敗ログと形状解析データを解析し、「把持成功確率推定モデル」「吸着力・角度の動的補正制御」「把持方式自動選択」の3つの要素を特定しました。特に“動的補正を伴う確率推定制御”については、先行特許に存在しないという新たな差分を明確にしました。
この結果、発明提案書の作成から出願ドラフト化までのプロセスが効率化し、開発サイクルが加速。実際には、ロボットの把持成功率が92%に達し、処理速度も25%改善されました。この改善により、現場での欠品や再ピック作業が減少し、物流ライン全体の効率が飛躍的に向上しました。
今後の展望
今後、リーガルテック株式会社はMyTokkyo.Aiを通じて、物流ロボティクスの発展と知財戦略の深化を支援していく考えです。また、把持制御や運搬最適化といったロボット制御技術だけでなく、3D形状と力覚、接触状態を含むマルチモーダルセンシングによる複合データ解析にも取り組むことで、より進化した自律ロボット技術の知財化を推進していく予定です。
まとめ
MyTokkyo.Aiの導入によって、物流倉庫におけるピッキングロボットの性能が大幅に向上し、開発の効率化と知財戦略の強化が実現しました。今後も技術の革新が期待され、AIが物流の未来を変えていくことでしょう。
会社情報
- 会社名
- リーガルテック株式会社
- 住所
- 東京都港区虎ノ門5-13-1虎ノ門40MTビル4F
- 電話番号
- 03-5733-5790
トピックス(IT)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。