





株式会社人機一体が提案する次世代ロボットプラットフォーム構築への挑戦
株式会社人機一体が目指す次世代ロボットプラットフォーム
株式会社人機一体(以下「人機一体社」)が、この度新たな開発フェーズへと進展し、独自のロボット工学技術を基にした汎用ロボットプラットフォームの構築を発表しました。本プロジェクトは、様々な現場における作業の自動化を目指し、特に「苦役」に直面している分野への実装を重視しています。
技術の深化から展開へ
人機一体社は、これまでの「技術の深化」を経て、次のステップである「技術の展開」に取り組んでいます。PoC(Proof of Concept)開発を通じて、多様な企業との協力のもと、数々の先進的な試作機を開発してきました。
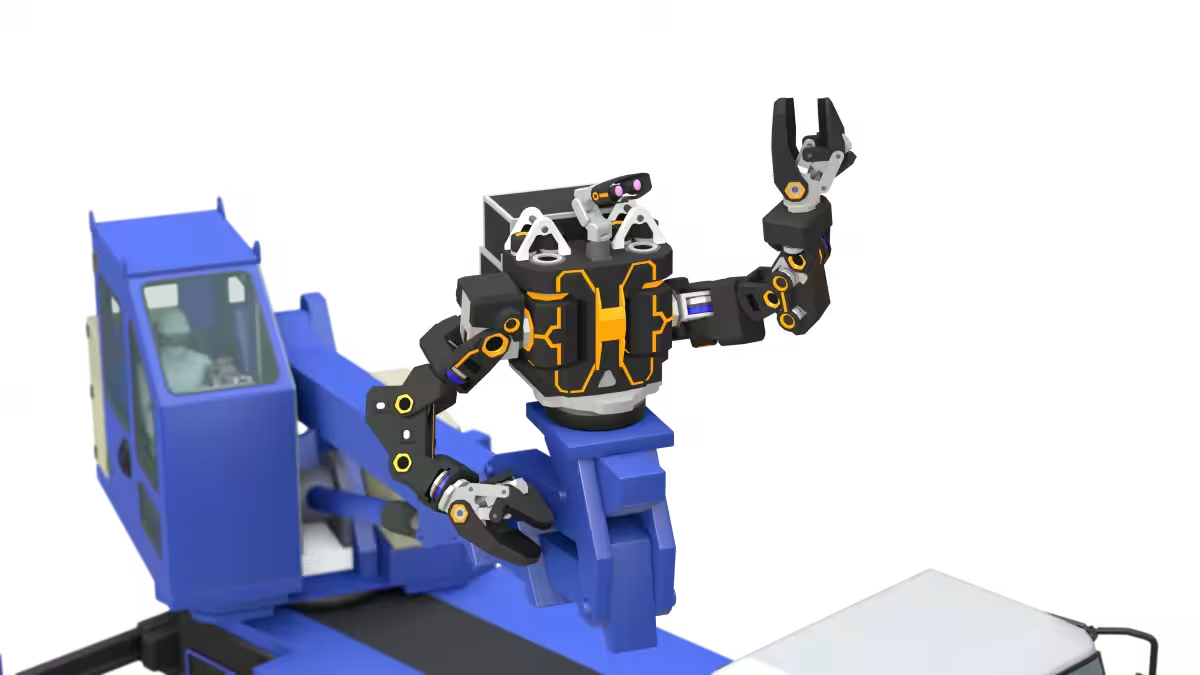
具体的なプロジェクトとしては、零式人機や人機カートなどがあり、これらは油圧重機や従来の産業用ロボットでは実現が難しい力の制御を行うことが可能です。人機一体社は、この過程で独自のロボット制御工学技術を蓄積し、さらなる発展を目指しています。
協働ロボットによる技術評価
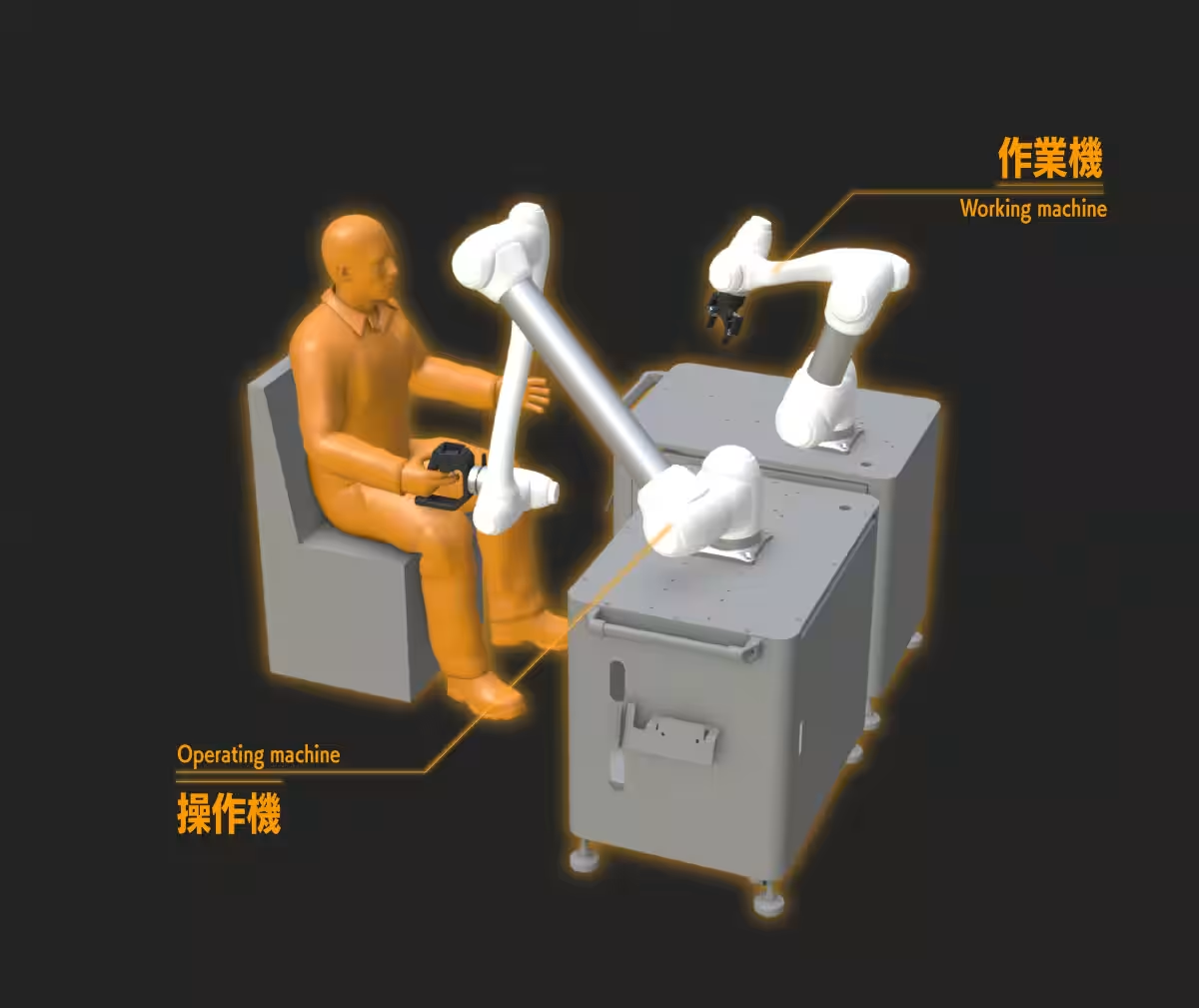
人機一体社は、協働ロボットを評価機として利用し様々な基礎研究を行ってきました。この取り組みでは、特異姿勢回避や遠隔操作技術の実装が行われ、その結果、操縦性が向上しました。人機一体社の力制御技術は汎用性が高く、多くの協働ロボットに応用可能であり、昨年行われた国際ロボット展でも多くの来場者が体験の機会を得ました。
早期の社会実装を目指して
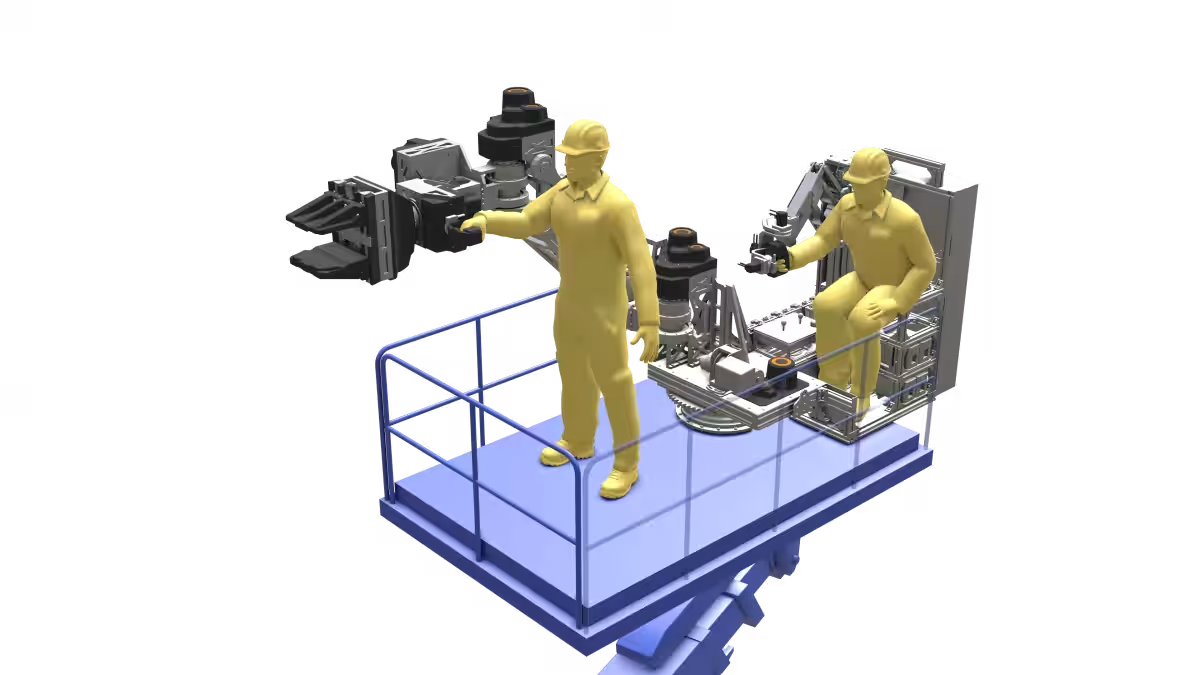
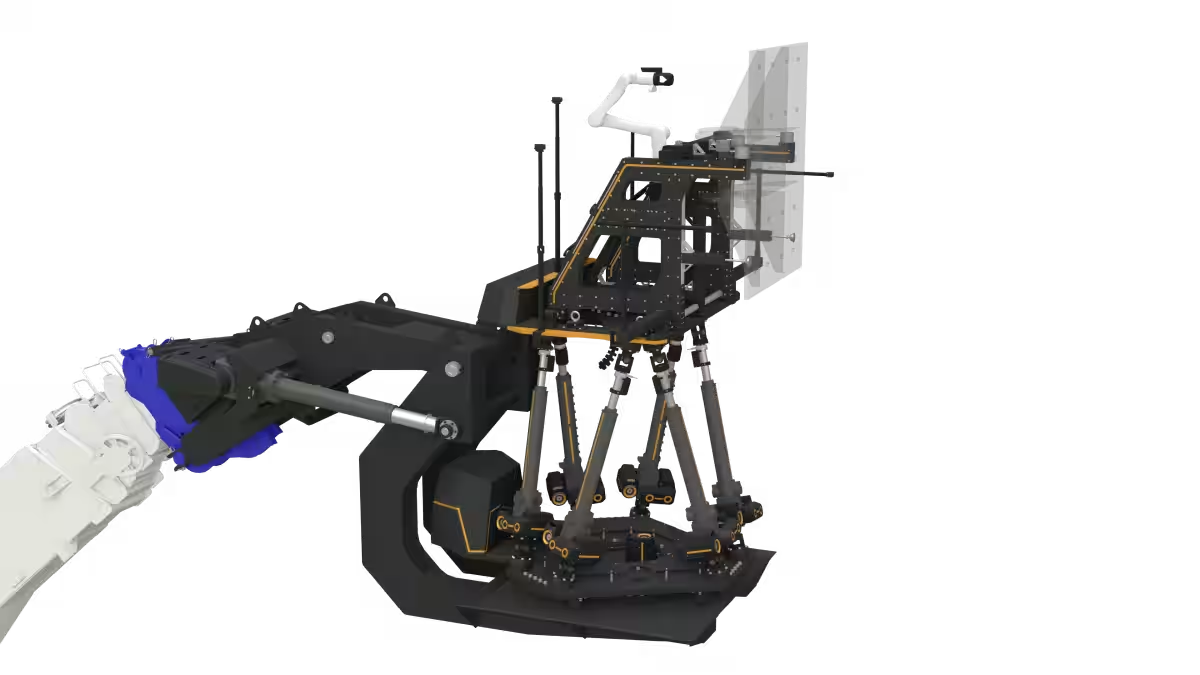
現在、株式会社人機一体社は汎用ロボットプラットフォームの構築に向け、重筋作業現場への早期の社会実装を実現するためのプロジェクトを進めています。具体的には、「人機バイラテラルアーム」と呼ばれる協働ロボットを開発し、この技術を現場にに実装することで自動化が難しかった作業の効率化を図ろうとしています。
この「人機バイラテラルアーム」は、既存の協働ロボットに人機一体社の力制御・パワー増幅技術を組み合わせ、直感的な操作を可能にします。さらに、RaaS(Robotics as a Service)として提供されるため、初期投資を抑えることができ、企業にとって負担が少ない導入が実現可能となります。
今後の展望
人機一体社は、協働ロボットへの独自技術の実装とともに、さらなる技術開発を加速し、これまで自動化が困難とされてきた様々な現場の課題を解決することを目指しています。具体的なニーズとしては、狭いスペースへの導入や多品種少量生産への対応、高温環境下でのハンドリング作業に至るまで多岐に渡ります。
これからの人機一体社の活動により、少しずつでも現実の問題解決に貢献し、人々の生活をより豊かにすることが期待されます。技術革新の新たな波が、現場の作業環境にどのような影響を与えるのか、一層の注目が集まります。
会社情報
- - 株式会社人機一体
- - 代表者: 金岡博士(Dr. KANAOKA)
- - 本社所在地: 滋賀県草津市青地町 648-1
- - 創立: 2007年10月01日
- - 資本金: 1億円
- - 事業内容: 先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス
- - URL: https://www.jinki.jp/




会社情報
- 会社名
- 株式会社人機一体
- 住所
- 滋賀県草津市青地町 648-1秘密基地人機一体
- 電話番号
トピックス(その他)







【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。