




Forcesteed Roboticsと川崎重工業が共同開発したロボットの新技術とは?
ロボットの新しい時代が始まる
近年、ロボティクスの進展は目覚ましく、AIや画像認識技術との融合によって、ロボットの能力は飛躍的に向上しています。その中でも、株式会社Forcesteed Robotics(Forcesteed社)と川崎重工業株式会社(川崎重工業)の共同開発による「セマンティックマップ生成技術」は、今後のロボットの自律運転に革命をもたらす可能性を秘めています。この技術は、ロボットが単に地図を作成するだけでなく、環境の意味を理解して行動できるようにすることを目指しています。
1. 技術の概要とその意義
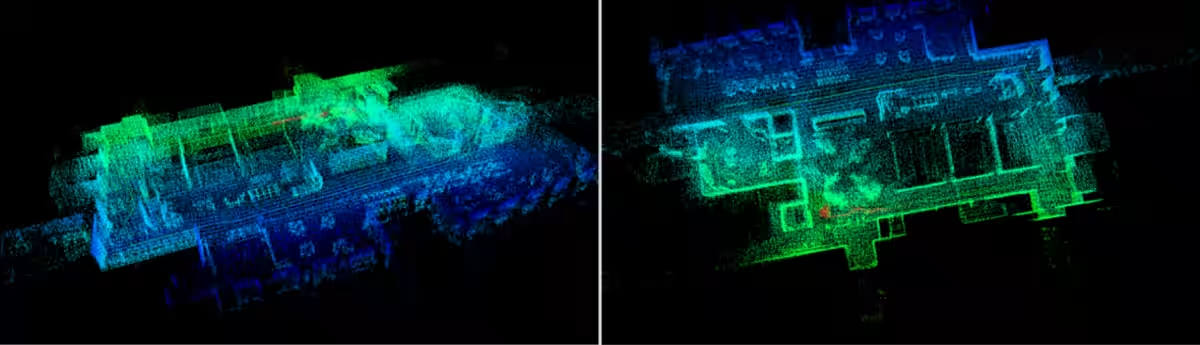
この新しい技術は、従来のSLAM(Simultaneous Localization and Mapping)技術を進化させたもので、カメラとLiDAR(Light Detection and Ranging)を用いて環境の情報を解析します。従来のSLAMでは、位置の特定や単純な地図の作成にとどまっていましたが、この新技術は「通路」や「障害物」といった単なる物理的情報に加え、「ドア」「棚」「作業エリア」といった意味を持つ情報まで取り込むことができます。
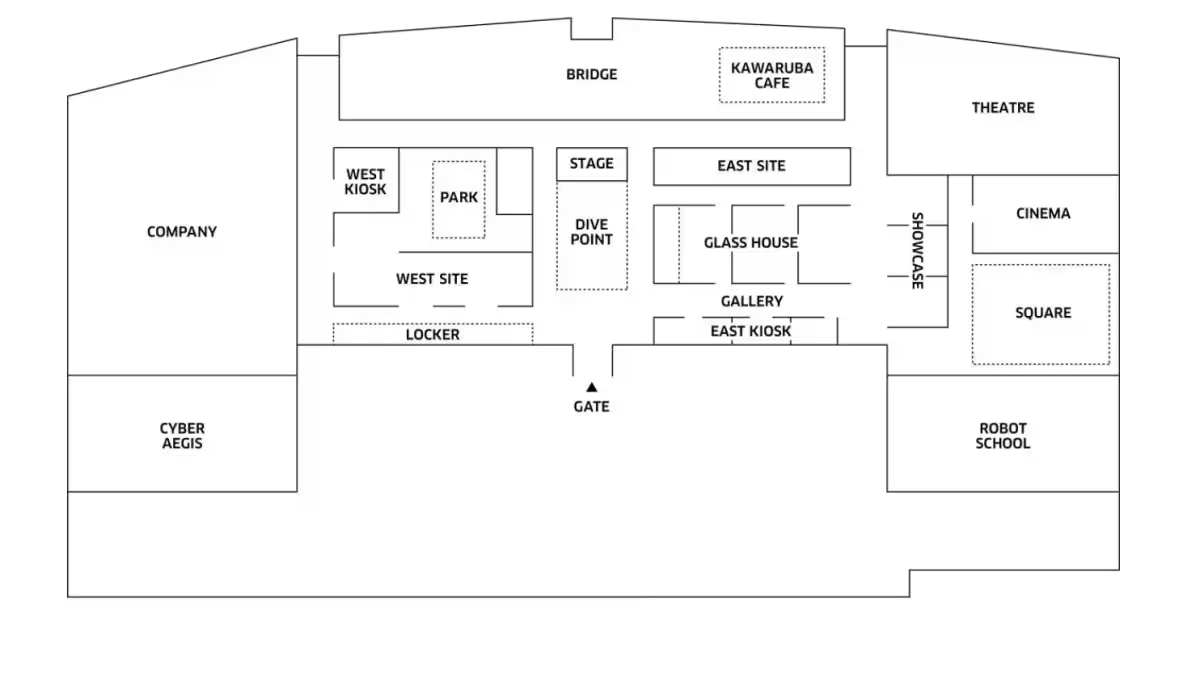
具体的には、Forcesteed社が持つAI技術と川崎重工業のロボティクス分野における専門知識を組み合わせて、このセマンティックマップを生成します。これによって、ロボットは特定の場所を効率的に特定するための意味検索に基づいた行動が可能になります。例えば、「会議室を探して移動する」といった柔軟な移動計画が実現します。
2. 特徴と課題
この技術にはいくつかの主な特徴があります。まず、カメラとLiDARを使って環境に意味ラベルを自動的に付与することができる点です。次に、意味情報にもとづいて柔軟な移動計画が設定でき、動的な環境への適応力が向上します。さらに、屋内実験においては80%以上のラベル認識精度が実現されています。
しかし、技術的な課題も残っています。計算の負荷、暗い場所でのカメラ性能の低下、意味ラベルの汎用性といった点がクリアされる必要があります。
3. 今後の展望
このセマンティックマップ生成技術は、今後の屋内作業や点検、警備ロボットへの実装が期待されています。両社は、2027年までに社会実装を実現するため、継続的に研究と実証試験を行っていくとしています。こうしたロボットが社会で幅広く採用されることにより、人々の生活の質も向上するでしょう。
4. KAWARUBAの役割
KAWARUBA(カワルバ)は、川崎重工業が運営するソーシャルイノベーション共創拠点です。ここでは多様なスタートアップや研究機関が集まり、オープンイノベーションの場として機能しています。Forcesteed社と川崎重工業はこの場を活用し、新たな技術の検証や実証試験を行っています。
5. まとめ
AI技術とロボティクスの融合は、これまでの常識を覆しつつあります。Forcesteed Roboticsと川崎重工業の共同開発によるセマンティックマップ生成技術は、ロボットが環境の意味を理解し、人と共存する未来の实现に向けた重要な一歩です。今後の進展に期待が寄せられます。




会社情報
- 会社名
- 株式会社Forcesteed Robotics
- 住所
- 東京都江東区青海2丁目7−4The SOHO 815
- 電話番号
関連リンク
サードペディア百科事典: 東京都 江東区 川崎重工業 Forcesteed Robotics セマンティックマップ
Wiki3: 東京都 江東区 川崎重工業 Forcesteed Robotics セマンティックマップ
トピックス(その他)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。