




DOBOT社製ロボットアーム「MG400」を活用した新たな自律タスクデモの開発プロジェクト始動
DOBOT社製ロボットアーム「MG400」を活用した新たな自律タスクデモの開発プロジェクト始動
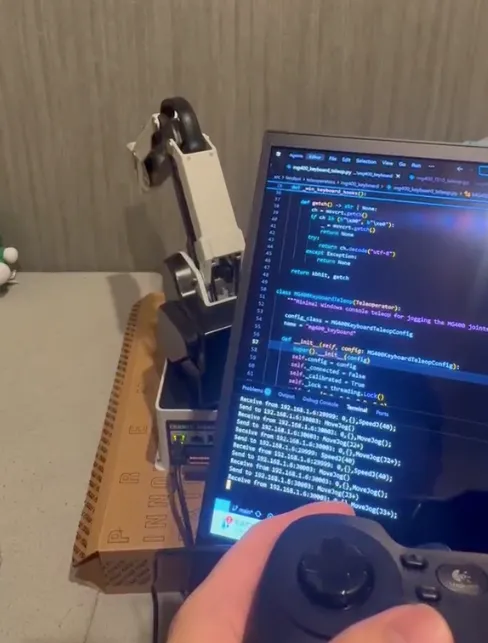
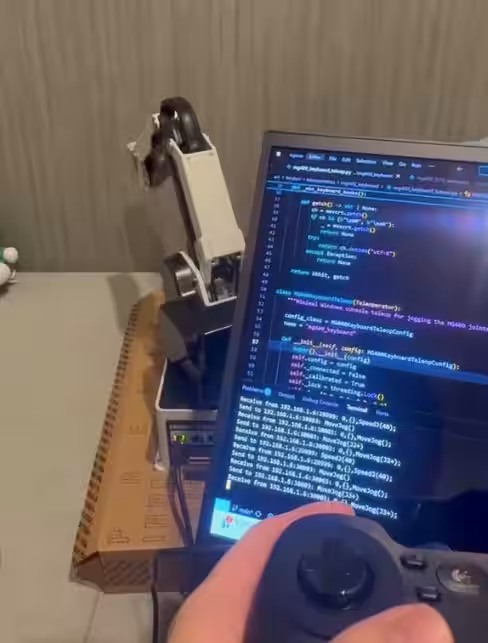
株式会社EmplifAIが、DOBOT社製の協働ロボットアーム「MG400」を用いた自律タスクデモの開発に着手しました。このプロジェクトは、オープンソースロボティクス基盤「LeRobot」を利用し、同ロボットの制御や学習スタックを構築することを目指しています。実施にあたっては、DOBOTの日本国内正規代理店である株式会社アフレルから「MG400」の貸出を受けて行われています。
開発の背景
昨今、製造業や物流業界、さらには研究開発の現場において人手不足やスキルの継承に課題が浮き彫りになっています。従来はプログラミングができる人のみがロボットを操作できる状況が支配していたため、より一般の業務員でも扱えるようなロボティクスの基盤が必要とされています。また、協働ロボットアームが世界中で普及しつつある一方で、メーカーごとにソフトウェアの仕組みが異なり、AIや模倣学習と連携しづらい状況が続いています。
プロジェクトの目的
EmplifAIは、フィジカルAIを用いたロボティクス開発を促進する中で、異なるメーカーのロボットでも同一のワークフローでデータ収集から学習、デプロイを進められる「マルチメーカー対応のロボット学習スタック」の必要性を強く感じています。今回のプロジェクトは、その第一歩としてコンパクトで扱いやすいDOBOT社製のMG400を選定し、オープンソースのロボティクスライブラリ「LeRobot」と組み合わせることで新たな開発基盤の構築を目指します。
MG400 LeRobotスタックの取り組み内容
本プロジェクトでは、以下のような機能を持つ開発スタックの構築が進められています。
- - テレオペレーションによるデータ収集パイプライン
- - 模倣学習・強化学習によるポリシー学習
- - 学習済みモデルのMG400実機へのデプロイ
- - マルチメーカー展開を見据えたアーキテクチャ設計
株式会社EmplifAIについて
EmplifAIは東京都千代田区に本社を持ち、フィジカルAIやロボティクスの開発支援を行っています。近年、AI技術が進化する中で、ロボット導入の支援やPoC(概念実証)に関するサービスも強化しています。公式サイトではさらなる情報が公開されているので、興味のある方はぜひチェックしてみてください。
EmplifAI公式サイト
今後、MG400における開発が進むことで、様々な業界でのロボット活用が加速し、勤務形態や作業の現場に新たな風を吹き込むことが期待されています。
会社情報
- 会社名
- 株式会社EmplifAI
- 住所
- 東京都千代田区神田小川町一丁目8番3号小川町北ビル
- 電話番号
トピックス(IT)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。