




ロボットアームによる透明物体把持の新技術、工場の自動化を加速
ロボットアームによる透明物体把持の革新技術
研究の背景
近年、製造業では自動化の重要性が高まり、ロボットアームが部品や製品の把持を行うシーンが増加しています。しかし、透明物体や光沢のある素材は、光の反射や透過によって3次元計測が不安定になり、自動把持が困難という問題がありました。そのため、従来のアプローチでは人手を介さざるを得ない場合が多く、生産性に大きな影響を与える要因となっていました。
研究の概要
そんな中、東京理科大学の荒井翔悟准教授と大学院のケニス銀河氏を中心とする研究グループが、新たな技術を開発しました。この技術は、透明な容器や光沢のある包装材のような難しい物体に対して、1台のカメラから形状を推定し、ロボットアームが自動で把持を行えるようにするものです。セマンティックセグメンテーションとShape from Silhouetteという二つの手法を用いることで、複数視点からの観測が必要な場合でも、高精度な把持が可能になります。
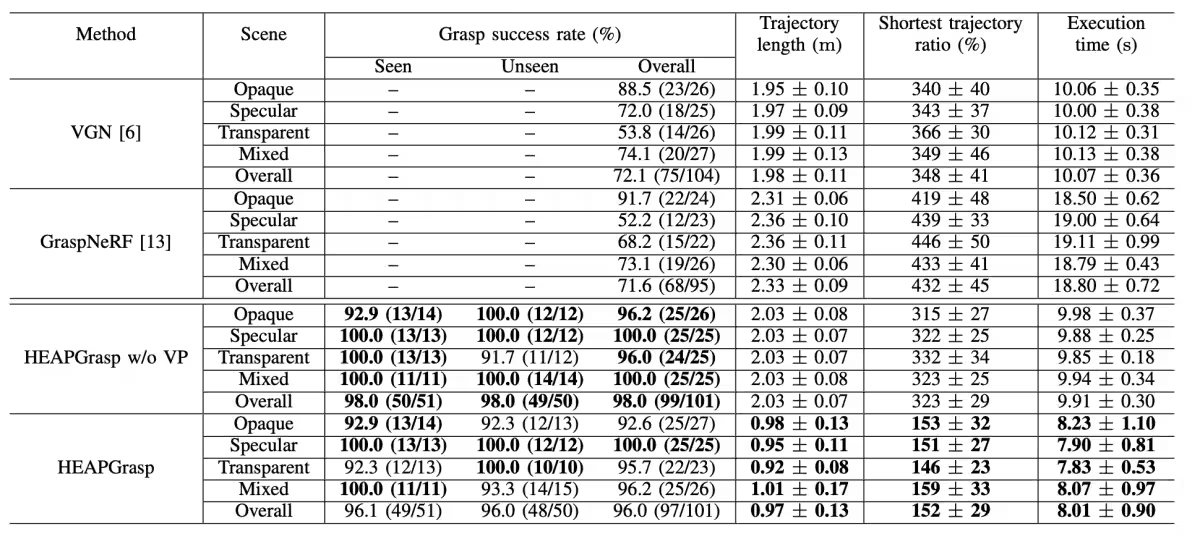
さらに、実機ロボットでの検証により、把持成功率96%を達成し、従来と比べてカメラの移動距離を52%、全体の実行時間を19%も短縮しました。この成果は、製造現場における自動化の進展に革新をもたらすものと期待されています。
技術の詳細
本研究の重要なポイントは、RGB画像を用いたセマンティックセグメンテーションで、これにより物体の形状を安定して復元することができます。また、画像撮影の移動時間と処理時間を削減する新たな手法を導入したことにより、精度と生産性の両立が実現されました。
例えば、従来の方法では、複数の視点からの撮影に時間がかかり、3次元計測の精度が向上する一方で、作業が非効率的になる問題がありました。しかし、本研究では、計測の精度向上とカメラ移動距離の短縮を両立するコスト関数を導入し、最適な撮影位置と経路を自動決定するシステムを構築しました。
実験では、透明物体を把持する際の成功率は非常に高く、例えば透明なトレーや光沢のある袋にしても96%の成功率を記録しています。これにより、ロボットアームの適用範囲が広がり、製造プロセスにおける自動化の実現が期待されています。
研究成果の意義
この技術により、これまでの自動化が難しかった透明物体や光沢物体の工程のロボット化が可能になります。生産性の向上に寄与することはもちろん、工場の作業効率の向上にも貢献するでしょう。
また、運用条件に合わせた最適な動作を生成する能力は、多品種対応の現場においても優れた効果を発揮すると思われます。
未来の展望
荒井准教授は、今後の展望として、「この技術を活用することで、製造や物流の現場で依然として人の手に頼らざるを得なかった工程を、より効率的に自動化することができると考えています。これにより、透明物体や特殊な形状の物体でも、容易にロボットが扱えるようになるでしょう」と語っています。
さらなる技術の発展を通じて、ロボットアームの精度と効率が向上し、さまざまな業界における生産性の向上が期待されます。本研究は、2026年には国際的なカンファレンスで発表される予定で、その成果が世界中の注目を集めることになるでしょう
参考文献
- - IEEE ROBOTICS AND AUTOMATION LETTERS, 荒井翔悟, ケニス銀河, “HEAPGrasp: Hand-Eye Active Perception to Grasp Objects with Diverse Optical Properties”, DOI: 10.1109/LRA.2026.3653331

会社情報
- 会社名
- 学校法人東京理科大学
- 住所
- 東京都新宿区神楽坂1-3
- 電話番号
- 03-3260-4271
トピックス(科学)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。