




ハエトリソウの閉合運動のメカニズム解明に向けた新たな研究成果
ハエトリソウの閉合運動のメカニズム解明に向けた新たな研究成果
食虫植物のハエトリソウ(Dionaea muscipula)は、その驚異的なスピードで葉を閉じて虫を捕まえることで知られています。しかし、その閉じるメカニズムはこれまで十分には解明されていませんでした。最近の研究により、葉の大きさや曲がり方と閉じる速度との関係が新しい数理モデルを用いて明らかにされました。この成果は、ハエトリソウの運動解析だけに留まらず、将来的には技術への応用が期待されています。
研究の背景
ハエトリソウは、虫を捕まえるために葉を閉じる速度が1秒以内と非常に速い特性を持ちます。この特性は、通常6つの感覚毛が刺激されることで引き起こされます。しかし、どのようにしてこの速い動作が実現されるのか、まだ多くの謎が残されていました。この研究では、葉のサイズが閉じるスピードに与える影響について着目し、サイズと運動の関係を探ることが目的とされています。
数理モデルの開発
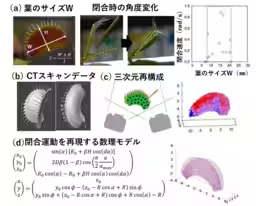
秋田県立大学の大橋教授と平田大学院生をはじめ、北海道大学や埼玉大学の研究者たちとの共同研究で、CTスキャンと三次元の再構築データを用いて、ハエトリソウの閉合運動を再現できる数理モデルの開発に成功しました。このモデルは、葉のサイズおよび曲率が閉じる速度にどう影響するのかを解析するための鍵となります。
研究成果
研究の結果、葉が大きいほど速く閉じる傾向があることがわかりましたが、葉のサイズが6㎜未満または21㎜を超える場合、正しく閉じることができない可能性が示されました。これにより、葉の曲がり具合が速度に与える影響が強調され、特に小さな葉では効果的に閉じることが難しいことが理解されました。
ハエトリソウの運動の仕組み
葉が閉じる際の曲がり具合を示す指標を測定した結果、葉の大きさや開き方、閉じ方における制約が明らかになりました。開いた葉から閉じた状態への変形を追跡し、運動のメカニズムを数式で表すことで、ハエトリソウの動作の理解が深まります。
将来の応用
この研究の結果は、生物模倣技術やソフトロボティクスの新たな開発に活用される可能性があります。特に、葉の動き方に基づいた新しい構造や機構の設計が期待され、将来的にはより機能的ながら柔軟なロボットの制作に繋がるかもしれません。技術が進化する現代において、生物の動作メカニズムの理解は、新たな技術革新の礎を築くものとなるでしょう。
まとめ
今回の研究は、ハエトリソウの閉じる運動のメカニズムを解明し、さらにそれを基にした新技術の開発に貢献することが期待されています。生物から多くの知見を得ることで、柔軟な技術と設計が可能になり、将来的には多くの分野に革新をもたらすことでしょう。ハエトリソウの力強い生き方や動きには、私たちが学ぶべきポイントがまだまだたくさん秘められています。







会社情報
- 会社名
- 秋田県立大学
- 住所
- 電話番号
トピックス(科学)



【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。