





リアルワールドが新しいロボティクス基盤モデル「RLDX-1」を発表、未来の自動化を促進
新たなロボティクス基盤モデル「RLDX-1」の登場
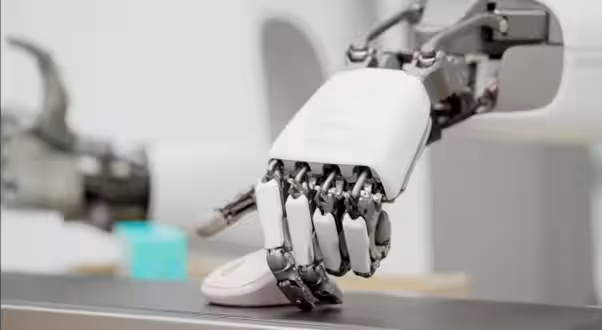
2026年5月7日、リアルワールド(RLWRLD)は日本初の独自ロボティクス基盤モデル「RLDX-1(リアルデックス)」を公式に発表しました。このモデルは、基本設計に「Dexterity-First」アプローチを採用し、視覚や言語に加え、力、触覚、作業記憶といったさまざまな情報を単一のモデルで処理できます。これにより、従来の視覚・言語中心のシステムとは一線を画する高性能を実現しました。
器用さが知能の源
一般的には、先に知能が実現されることで器用さが後から付随するという見解が支配的ですが、リアルワールドはこれには異を唱えています。彼らの見解では、器用さ自体が知能を持って物理的な行動を行うために不可欠な要素であり、力加減や触覚、接触タイミングといった視覚では捉えられない情報を扱うことで、理念に基づき精密な作業の自動化が可能になるとしています。この考え方を検証するために、彼らは独自の「DexBench」というベンチマークを開発し、五つの観点から手の操作能力を評価しています。
1. 把持の多様性
2. 空間精度
3. 時間精度
4. 接触精度
5. 文脈認識
卓越した性能を持つRLDX-1
RLDX-1は、グローバル公開ベンチマークである8種類のテストにおいて、既存最高性能モデルを超える結果を上げました。たとえば、「RoboCasa Kitchen」タスクでは70.6点を獲得し、これまでのVLA(視覚・言語・行動)モデルとしては高い得点を記録しています。ヒューマノイド用評価である「GR-1 Tabletop」でも58.7点を記録し、次点のモデルに対して10.7ポイントの差を見せつけました。
コアアーキテクチャ「MSAT」の特徴
この新しいシステムの中核を成すのは、マルチストリーム・アクション・トランスフォーマー(MSAT)です。MSATは、視覚・言語・触覚などの異なる情報ソースを独立したストリームで処理し、モダリティ間で共同注意を行うことで、より精度の高い処理を可能にしています。これにより、物理信号やメモリに基づく情報も同時に処理できるのです。
産業への実用性
RLDX-1は、設計段階から産業ニーズを考慮し、製造や物流における実際の作業を忠実に遂行する能力を持つように作られました。リアルワールドは、数十社にわたる産業パートナーと連携しながら、現場の作業を観察し、評価基準を設けています。これにより、彼らは「DexBench」を産業標準として位置づける目標を掲げています。
グローバルなエコシステムの構築
さらに、リアルワールドは、米国でのローンチイベント「Dexterity Night」にて、他国のハードウェア企業との連携を発表しています。このイベントでは、ロボット産業が次に向かうべき手技の可能性についての議論も行われる予定です。RLDX-1は、今後の産業界での広範な適用を見据え、複数のプラットフォームで動作できることを証明しています。
未来への展望
今後、リアルワールドは「4D+ワールドモデル」という新たな技術ビジョンの実現に向けた取り組みを進めていきます。RLDX-1はその第一歩であり、映像データだけでは捉えきれない物理情報の重要性を訴えています。このように、彼らは従来のロボティクスの限界を超えて、産業現場での精密作業に特化した新しいモデルを作り上げようとしています。
会社概要
リアルワールド(RLWRLD)は、人間のような操作能力と認知力を備えたロボティクス基盤を開発するフィジカルAI企業です。2024年に設立され、各国に拠点を持つ彼らは、自社の技術とデータを駆使して産業用ロボット市場でのリーダーシップを追求しています。公式ウェブサイトはこちらです。




会社情報
- 会社名
- リアルワールド株式会社
- 住所
- 東京都千代田区丸の内1丁目5番1号新丸の内ビルディング9階
- 電話番号
- 03-4530-3160
トピックス(IT)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。