




無人ドローンによる鋼材測定システムでトンネル工事が安全に進化
無人ドローンによる鋼材測定システムでトンネル工事が安全に進化
大阪工業大学は、清水建設、演算工房、シュルード設計との協力により、山岳トンネル工事における切羽形状測定作業を無人化する新しいシステム「Perch-RIM」を開発しました。このシステムは、鋼製の支保工に吸着させたドローンから、高精度な切羽の形状データをリアルタイムに取得することができます。これにより、工事関係者が危険な切羽近くに立ち入ることなく測定作業が行えるため、安全性が大きく向上します。
山岳トンネルの掘削現場では、掘削面からの岩石の剥落、いわゆる“肌落ち”事故が多発しています。このリスク軽減のため、切羽形状の測定作業が無人で行える仕組みが求められていました。従来の方法では、測定のために三脚を使って切羽前に立ち入る必要があったため、リスクの高い作業が避けられない状況でした。
Perch-RIMの概要
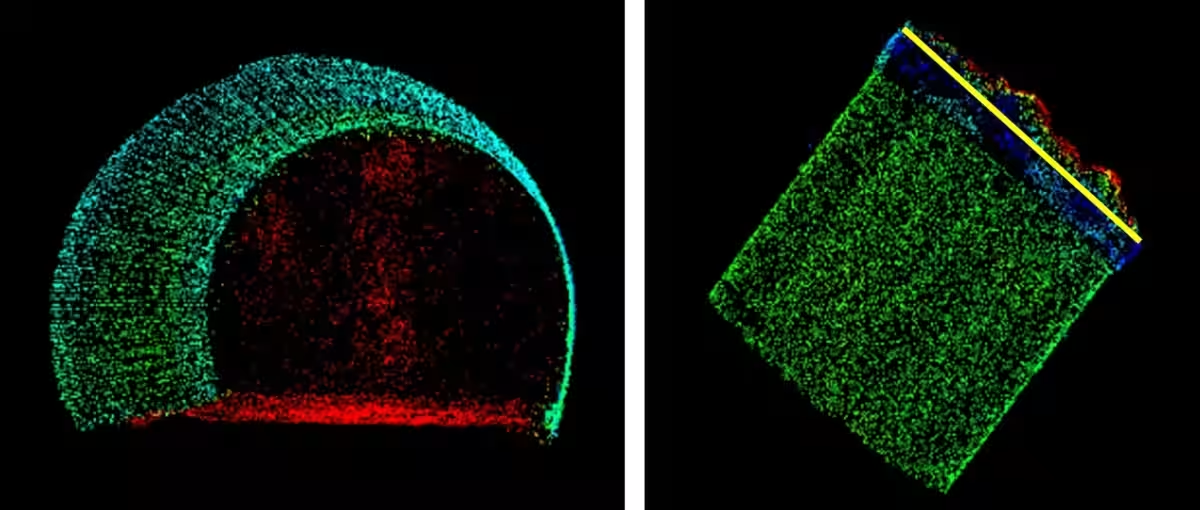
「Perch-RIM」は、ドローンに永電磁石とレーザーセンサ(LiDAR)を搭載し、トータルステーションを使って精確な三次元座標を計測します。測定方法は、まず切羽から十分に離れた位置からドローンを飛ばし、鋼製支保工に吸着させます。その後、トータルステーションからドローンの三次元座標を取得し、LiDARによって切羽面の三次元点群データを取得。その結果をもとに、精密な切羽形状の絶対座標が算出されるのです。
この新しい測定方法の最大の利点は、掘削精度の絶対評価が可能になることです。工事関係者が切羽近くに接近することなく測定が行えるため、肌落ちのリスクが低減され、安全な環境での作業が実現します。また、作業時間も大幅に短縮されるため、工期の短縮や人員配置の最適化、さらにはコスト削減にも寄与します。
システムのさらなる活用
さらに、ドローンに搭載されたカメラを利用することで、遠隔からの坑内巡回、切羽の監視、環境モニタリングなど、様々な業務にも対応可能です。これにより、Perch-RIMは多様な場面での使用が期待されています。
実際、すでに中央自動車道や米子自動車道、北海道の新幹線建設において実証実験が行われ、その有効性が確認されています。このシステムを通じて、今後も建設業界の現場で実証を続け、切羽付近の無人化を加速させる方針です。
共同開発者の役割
このプロジェクトにおいては、清水建設が全体システムの構想と評価を行い、演算工房が三次元点群データの計測ソフトを開発、シュルード設計がドローンシステム設計を担当しました。さらに、大阪工業大学のロボット工学科に所属する東善之准教授もシステムの監修に関与しています。
このように、異なる分野の専門家が集まり、協力を通じて新しい技術の開発が進められています。トンネル工事が抱える多くの課題に対して、Perch-RIMが貢献することが期待されます。

会社情報
- 会社名
- 学校法人常翔学園
- 住所
- 大阪市旭区大宮5-16-1
- 電話番号
トピックス(地域情報)







【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。