



リンク式サスペンション技術が進化。サービスロボットの未来を切り開く!
日本精工が追求するサービスロボットの未来向けプラットフォーム
日本精工株式会社(NSK)は、屋外を中心に多様な走行環境に対応するサービスロボットの開発を2023年から始めており、その中核を成す技術の一つが「リンク式サスペンション」です。この技術が完成し、ロボットの安定性と走行性能を大きく向上させることが期待されています。
サービスロボットのニーズと課題
近年、教育機関や飲食店、宿泊施設における人手不足が深刻化しており、安定したロボット運用が求められています。しかし、屋外環境における整備不足の路面や凹凸が走行の大きな障壁となっていました。そのため、AEDや警備、物流など様々な分野でのロボット普及が遅れていたのです。
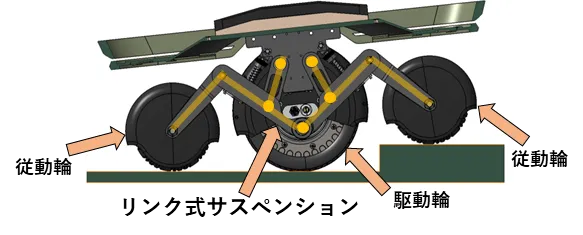
リンク式サスペンションの役割
リンク式サスペンションは、駆動輪と従動輪をリンク機構で接続し、凹凸のある路面でも安定した接地を可能にします。この技術により、サービスロボットの動作がよりスムーズになり、必要な推進力を確保することができます。NSKは2023年に発表したプロトタイプを基に改良を続け、2024年には立命館大学との実証プロジェクトを通じてその能力をさらに引き上げる計画です。
実証実験の進捗
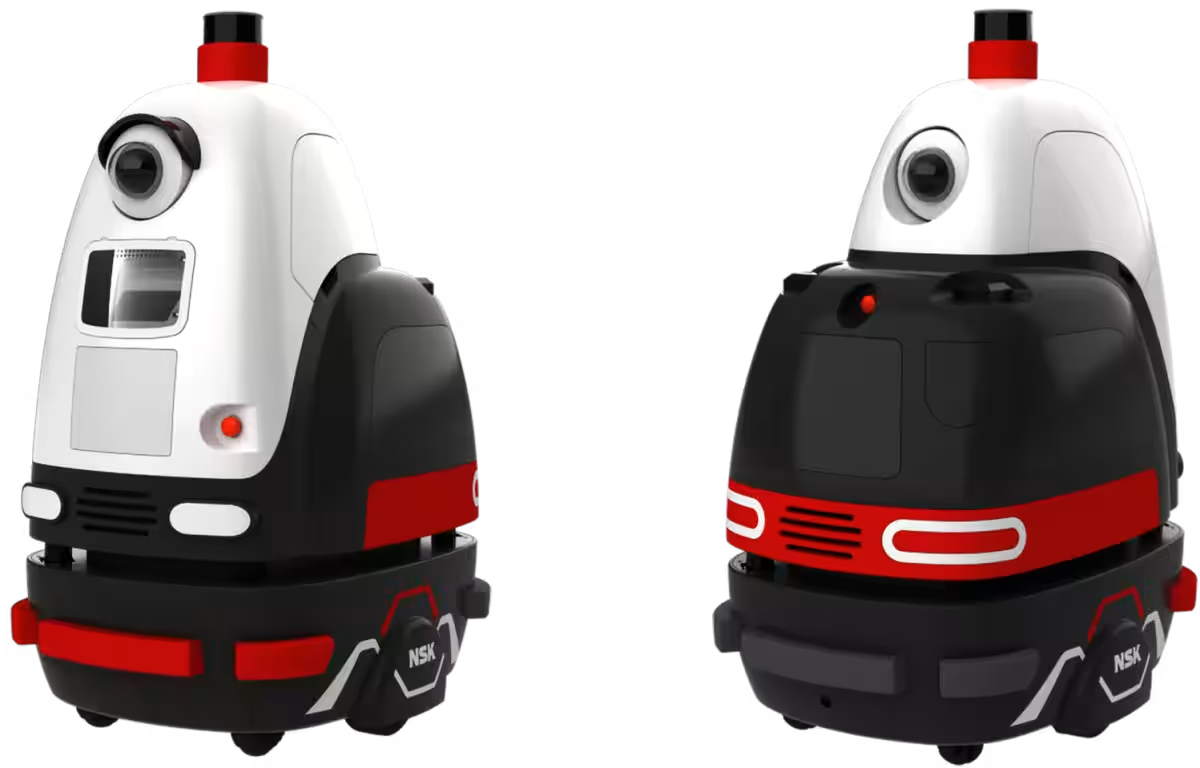
立命館大学内で進行中の屋外警備ロボットの実証プロジェクトでは、リンク式サスペンションの効果を実際の運用環境で検証しています。特に、段差やスロープ、点字ブロックなど、様々な路面凹凸に対する対策が求められています。具体的には、NSKが設計したインテグレーションモデルが、赤外線ライトとAI画像解析技術を搭載し、不審者や危険物を高精度で検知するなど、ロボットの機能性向上に努めています。
将来の展望
NSKは、このリンク式サスペンションを搭載したサービスロボット向けプラットフォームを2027年に市場に投入する予定です。低床ボディという特長を持つことで、機体が小型化されることにより、より多くのユースケースを想定したサービスロボット市場での需要を高めることが期待されます。今後、さまざまなユースケースでの実証実験がさらなる機能の改良につながり、現場ニーズに即したロボットの提供が進むでしょう。
NSKのビジョン
NSKは、長年蓄積したベアリング技術を核に、新たな事業展開にも取り組んでおり、MOTION & CONTROL™という理念を通じて、より安全で持続可能な社会づくりにも貢献しています。企業としての成長と社会貢献の両立を目指し、2026年ビジョンを掲げて全力で取り組んでいます。このような技術革新が進む中、サービスロボットの広がりがどのように社会を変革していくのか、今後の動向が注目されます。







会社情報
- 会社名
- 日本精工株式会社
- 住所
- 東京都品川区大崎1-6-3日精ビル
- 電話番号
トピックス(エンタメ)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。