



MizLinxが水中ロボット技術で「NEDO Challenge for BLUE ECONOMY」優勝
MizLinxが「NEDO Challenge for BLUE ECONOMY」で輝かしい勝利
株式会社MizLinx(本社:東京都荒川区、代表取締役CEO:野城菜帆)は、国立研究開発法人新エネルギー・産業技術総合開発機構(以下 NEDO)が主催する「NEDO Challenge for BLUE ECONOMY」の1次コンペティションにおいて、部門5「船底マッピング・船底状態の把握」で見事優勝を果たしました。このコンペは、2026年5月11日から5月15日まで静岡県沼津市にある平沢マリンセンターで開催され、多くの先端技術を持つ企業や機関、大学が参加しました。
コンペティションの意義
「NEDO Challenge for BLUE ECONOMY」は、地球温暖化に関する問題への対応や、海洋生物の管理戦略の促進を目指すプログラムです。具体的には、海洋に関する様々な技術革新を促すことを目的とし、参加者は水中ロボットやAI技術を駆使して、各自の持つ解決策を競い合いました。部門5では特に、船底の状態を詳細に検査するための技術が焦点となり、その測定精度や効率化が求められました。
受賞内容と成果
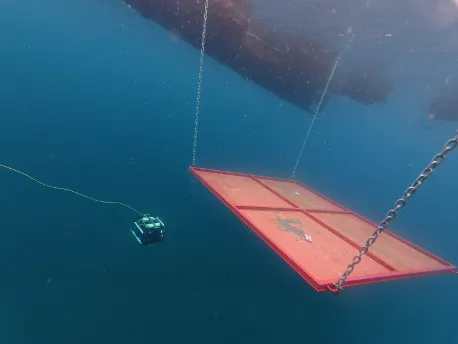
MizLinxが提案したのは「狭隘環境を潜航可能な船底検査ロボットの開発」という独自の技術です。競技では、幅3m、長さ3mの鉄板を水中ロボットが計測し、バイオフィルムの有無を高精度でマッピングする技術を披露しました。これを実現したのは、水中ドローンMizLinx UUVの性能です。このロボットは狭い空間でも安定して航行でき、AIによる微細な付着物の判定ができる点が高く評価され、見事に優勝への道を開きました。
受賞の意義
MizLinx取締役の石川空さんは、「今回の優勝は、海洋産業における脱炭素化や省人化に向けた技術開発の成果であることを誇りに思います。」と語る。このコンペでの成功は、MizLinxが水中ロボットやIoT、AIを融合させた新たな海洋技術の社会実装に向けた第一歩となりました。
開発した技術について
MizLinxが使用した船底検査ロボットシステムには、以下のような特長があります。
- - 自己位置推定: IMUおよびDVL、音響ソナーを用いることで、外乱環境においても安定した航行を実現。
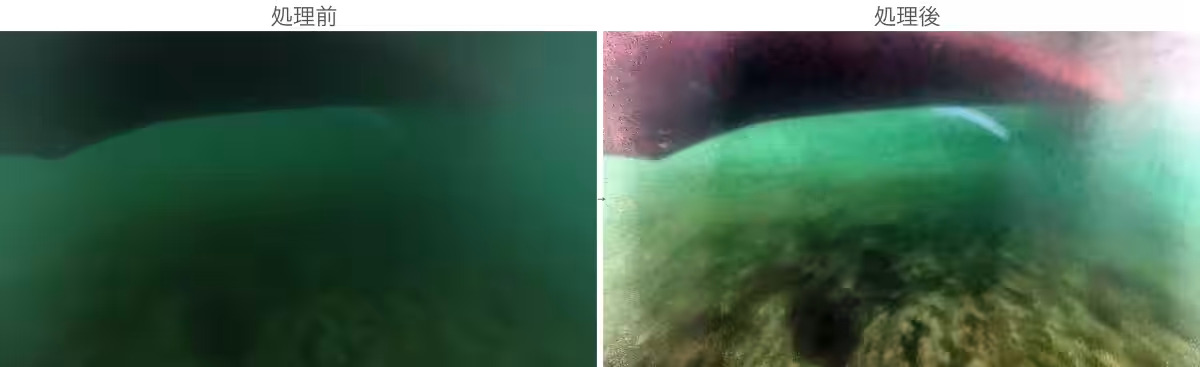
- - 高解像度撮影: 高感度のカメラとLED照明を駆使し、低照度や濁水の条件でも鮮明な画像を取得。
- - AI解析: 画像からマイクロファウリングを自動判定する独自のAIモデルを用いています。
この技術によって、従来の手法に比べて、船底点検の効率化や省人化を進めることが可能となります。特に、海運業界での需要が見込まれ、商業的にも大きなインパクトが期待されています。
今後の展望
MizLinxは、この受賞を機に水中ロボットシステムのさらなる研究開発を進めていく声明を表明しています。目指すのは、自律型の水中点検技術の実現です。具体的には、海洋産業におけるデジタルトランスフォーメーションを見据え、環境への配慮とともに技術革新を進めていく方針です。この挑戦が、今後の海洋産業の未来を切り拓くカギとなるでしょう。
会社について
株式会社MizLinxは、2021年に設立され、水中ロボット・海洋モニタリングシステムの開発を行っています。自社開発した製品には、海洋モニタリングシステム「MizLinx Monitor」や水中ロボット「MizLinx UUV」があり、今後も様々な技術進化に貢献していく予定です。詳しくは、公式サイトを訪れてください。

会社情報
- 会社名
- 株式会社MizLinx
- 住所
- 東京都荒川区南千住8丁目5番7号白鬚西R&Dセンター216号室
- 電話番号
トピックス(IT)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。