




ポケット・クエリーズが建築研究所と連携、ロボットによる無人被災地調査を実現へ
ポケット・クエリーズが建築研究所と取り組むロボットによる被災地調査
株式会社ポケット・クエリーズ(以下、ポケクエ)は、国立研究開発法人建築研究所(以下、建築研究所)と協力し、ヒューマノイドロボットおよび四足歩行ロボットを用いた被災地調査の無人化に向けた共同研究を開始しました。この研究は、自然災害の増加に伴う迅速な状況把握と専門技術者不足への対策として位置づけられています。
研究の背景と目的
ポケクエと建築研究所は、これまでの研究を経て、災害時の迅速な反応を可能にする技術開発に注力しています。日本政府が設定した「重点投資対象17分野」の中で、まずは「防災・国土強靭化」や「AI技術」を中心に、被災建築物の調査を支援するロボティクス技術に焦点を当てています。
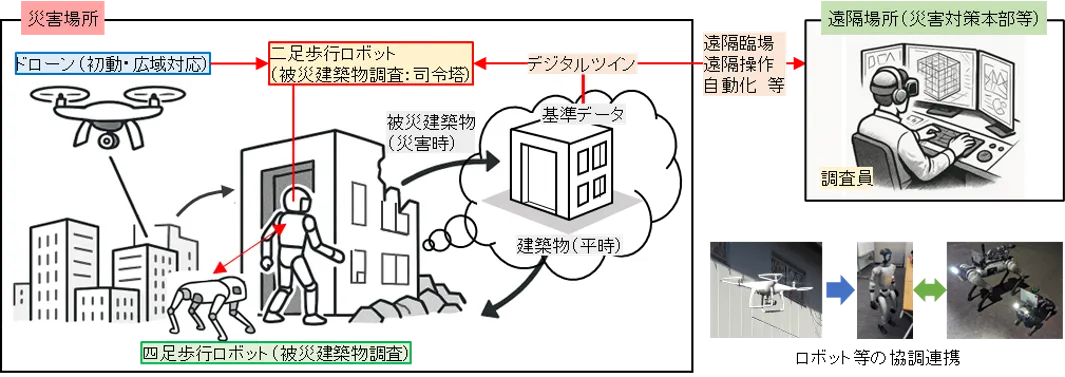
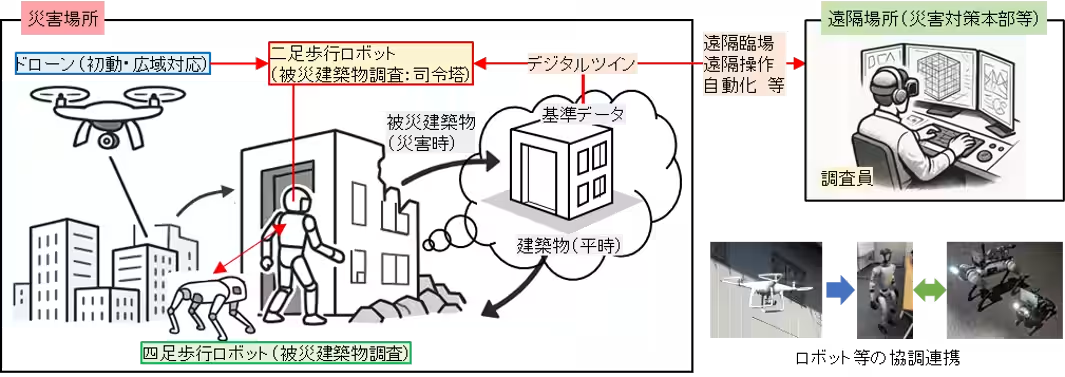
共同研究の目的は、フィジカルAIとロボット群の協調動作を通じて、被災地の調査を完全に無人化し、業務の効率化を図ることです。これにより、危険を伴う現場調査を迅速かつ安全に行える体制を整えます。
取り組み内容
本共同研究は、遠隔地から操作できるロボットネットワークを統合し、調査・記録作業を自動化する体制を構築することを目指しています。主な特徴として、以下の要素が含まれています。
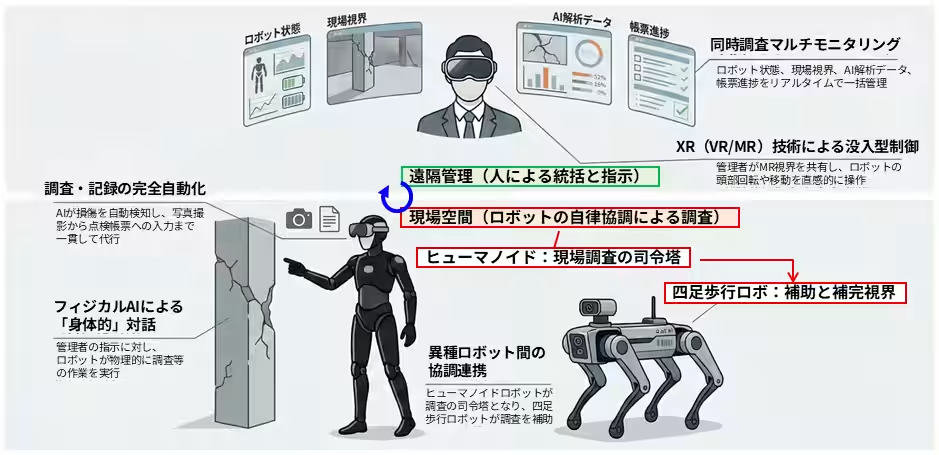
1. 直感的遠隔操作: VR技術とヘッドトラッキングを駆使して、データをリアルタイムで取得。ヒューマノイドロボットが人間用の調査機材を扱い、異常を発見した際には身体的な動作でその情報を伝えます。
2. 異機種ロボットの協調: 複数のロボットが連携して現場を立体的に把握し、必要な情報を速やかに取得します。
3. 完全無人化の事務フロー: AI画像認識技術により、損傷を検知し、自動的に写真撮影や危険度判定を行います。
実証実験の概要
現在、実際の環境で実証実験を行っており、被災状況の把握における本システムの有用性を確認しています。実施は二段階に分かれており、基礎的な検証を行った後、実用性や性能を評価する段階に入っています。
第1段階: 基礎検証
この段階では、ロボットの基本動作と通信プロトコルの確認を行い、各ロボットの移動性能を検証しました。センサーから得られるデータも実験し、初歩的な被災状況の把握を試みました。
第2段階: 実用性・性能検証
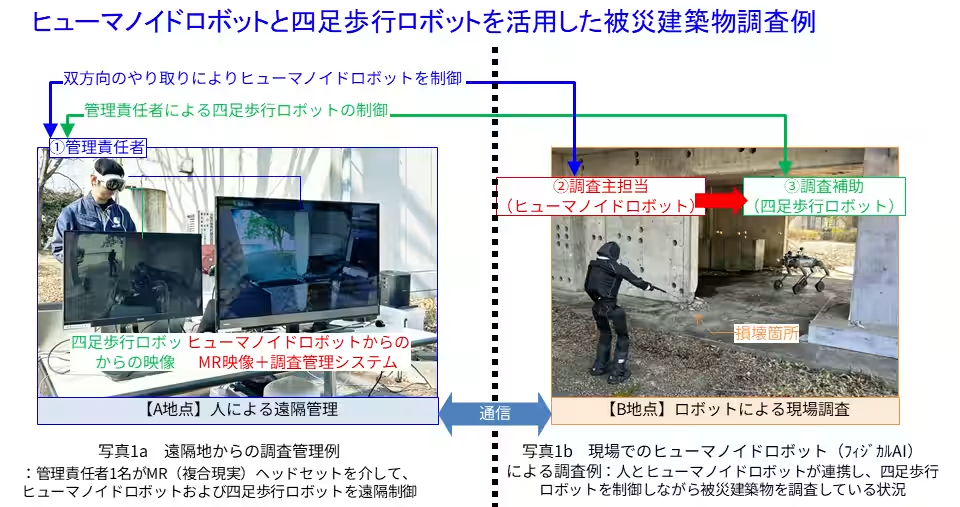
この段階では、実際の被災状況を模した実験を実施し、複数のロボットによる協調的な調査プロセスを評価しました。ヒューマノイドロボットと四足歩行ロボットが連携し、具体的な調査業務を行います。
今後の展開
実証実験を通じて得た知見に基づき、ロボットによる調査と人力調査との違いを定量的に評価し、さらなる技術改良を進める予定です。特に、通信環境の安定化やセンサーチューニングが課題となっており、今後の研究の焦点となっていくでしょう。
ポケクエと建築研究所の取り組みは、被災地における安全性を大きく向上させる可能性を秘めており、これにより未来の災害対応がより効率的かつ安全に行えるようになりそうです。今後の研究成果が注目されます。
会社情報
- 会社名
- 株式会社ポケット・クエリーズ
- 住所
- 東京都新宿区西新宿3-20-2東京オペラシティタワー52F
- 電話番号
- 03-5333-1533
トピックス(地域情報)



【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。