



量子コンピュータを活用したロボット姿勢制御手法の新提案
量子コンピュータによるロボットの姿勢制御手法
芝浦工業大学、早稲田大学、富士通株式会社の研究チームが、量子コンピュータを用いてロボットの姿勢制御に関する新しい手法を開発しました。この取り組みは、特に複雑な関節を持つロボットの「逆運動学計算」を効率化し、高精度での制御を可能にするものです。
背景:ロボットの姿勢制御の課題
ロボットが目標の位置に到達するためには、各関節の角度を求める必要があります。この計算は「逆運動学計算」と呼ばれ、特に多関節のロボットになるほど組み合わせが複雑化します。従来の手法では、関節数が17個にも及ぶ全身多関節モデルの計算は非常に負荷が高く、近似手法での運動計算が一般的でしたが、この方法では動作の滑らかさが欠ける問題がありました。
新手法の特徴
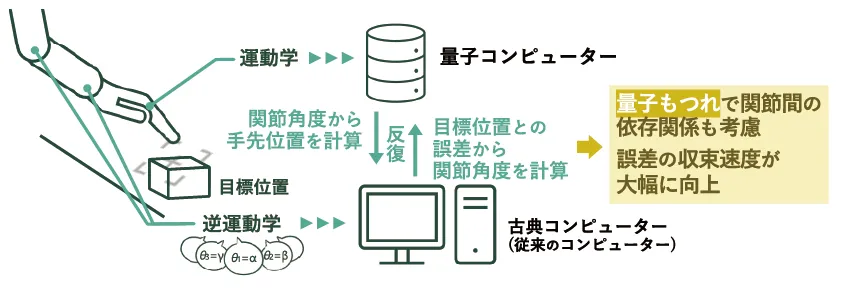
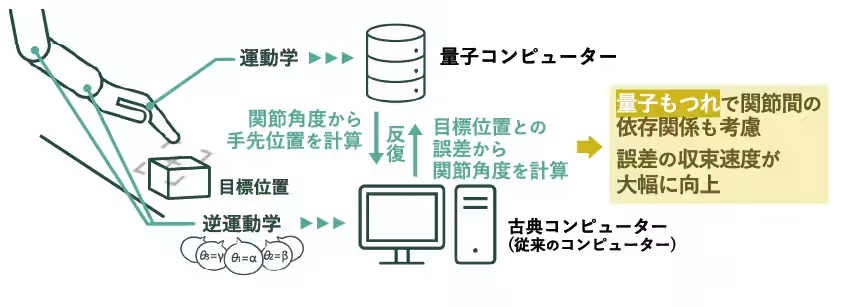
本研究チームは、量子コンピュータの特性を活かした新たなアプローチを提案しました。具体的には、ロボットの各部の位置や向きを量子ビットで表現し、量子回路を活用して順運動学計算を行います。
さらに、量子もつれを導入することで、親関節の動きが子関節へ自然に影響を及ぼすような構造を再現し、逆運動学計算の精度と収束速度を大幅に向上させることに成功しました。富士通の量子シミュレーターでの実験では、従来手法と比べて誤差を43%削減する結果が確認されました。
効果的な計算:ハイブリッド手法
今回開発された手法は、古典コンピュータと量子コンピュータを組み合わせたハイブリッド方式で、逆運動学計算を効率的に行う点が特長です。特に、ロボットが持つ17個の関節を持つモデルでも、約30分で運動計算を実行可能であるという試算が立てられました。
今後の展望
この手法は、ヒューマノイドロボットや多関節マニピュレーターのリアルタイム制御など、さまざまな応用が期待されます。特に、障害物の回避やエネルギーの最適化といった操作において、その効果を発揮するでしょう。また、量子フーリエ変換の高度なアルゴリズムとの組み合わせによってさらなる性能向上が見込まれています。
論文情報
この研究成果は、著者が大谷拓也教授(芝浦工業大学)、高西淳夫教授(早稲田大学)、原伸之氏ら(富士通株式会社)によるもので、科学的報告のジャーナルに掲載されています。具体的なタイトルは「Quantum Computation For Robot Posture Optimization」で、詳細はこちらから確認できます。
芝浦工業大学について
芝浦工業大学は、東京都江東区に位置する日本屈指の理工系大学です。多くの学生が海外派遣に参加し、産業界との連携による研究活動にも力を入れています。教育環境の質の向上にも力を注ぎ、2027年には創立100周年を迎える予定です。
早稲田大学について
1882年に設立された早稲田大学は、11の学術院からなる総合大学であり、学問の独立や活用を理念に掲げています。2032年には創立150周年を迎え、その研究成果のさらなる発展を目指しています。
富士通株式会社について
富士通は、社会の信頼を得るためのイノベーションを通じて、各種のデジタルトランスフォーメーション(DX)ソリューションを提供しており、サステナビリティの実現にも努めています。
会社情報
- 会社名
- 芝浦工業大学、早稲田大学、富士通株式会社
- 住所
- 電話番号
トピックス(科学)

【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。