



熊本大学が発表した高精度モデル化理論の革新とは
知識の基盤を深化させる熊本大学の新しい理論
熊本大学大学院先端科学研究部の岡島寛准教授を中心とする研究チームが、周期時変システムに対する高精度な数理モデル化の新たな基礎理論を構築しました。この成果は、2025年1月30日付けの「IEEE ACCESS」に掲載される予定です。従来の理論を拡張し、さらなる精度向上を実現したこの研究がもたらす影響について詳しく見ていきましょう。
研究の背景
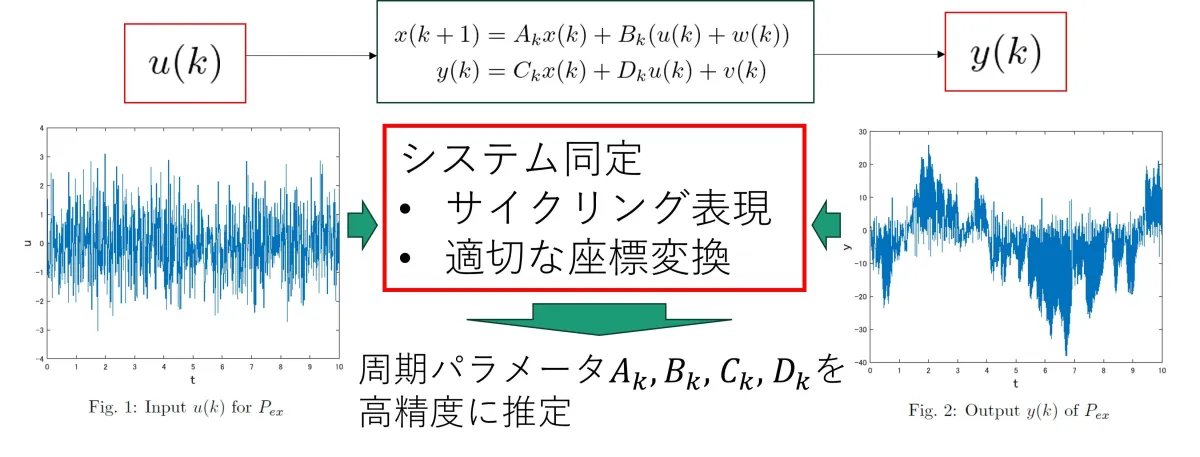
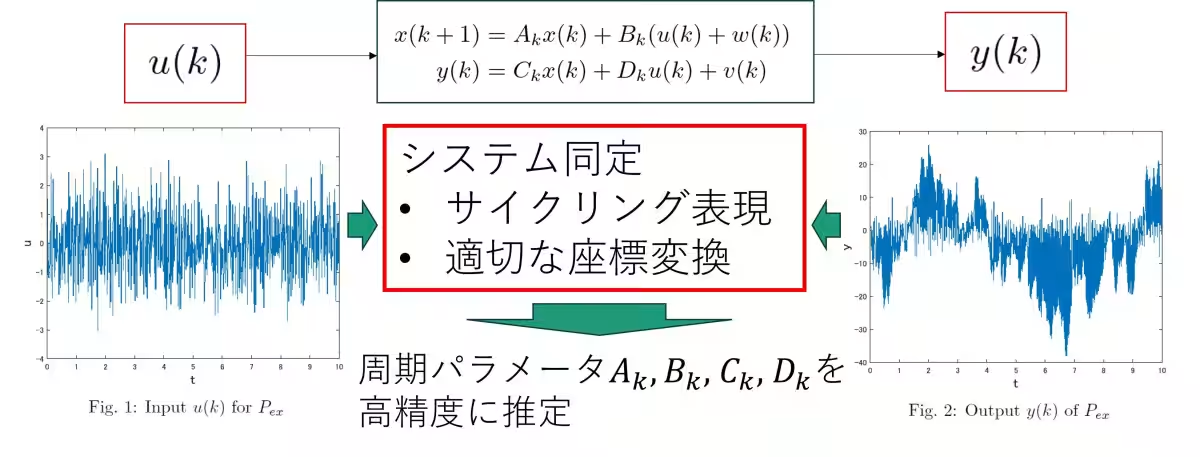
制御工学や人工知能(AI)の分野において、システムの動作を正確に表現するために、数理モデルが不可欠です。数理モデルの導出は「システム同定理論」を基に行われますが、これまでのアプローチでは対象が周期的に変化するシステムに対しては限界がありました。例えば、宇宙機のような周期的な軌道を描くシステムや、自動運転車、産業ロボットなどは、複数の計測周期を持つため、モデル化が特に難しいとされています。これが、システム同定が周期時変システムに対して容易とは言えなかった理由です。
新たなアプローチでの高精度モデル化
本研究では、周期時変システムの数理モデルを導出するために、「サイクリング」と呼ばれる手法を利用しています。この手法は、従来から研究されてはいたものの、システムの次元が増加することからあまり実用化されていませんでした。岡島准教授のチームは、まずこの手法によって得られるマルコフパラメータに重要な性質を見出し、それを元に状態空間の表現を適切に座標変換することで、元の周期時変システムの数理モデルを構築しました。これにより、従来の手法に比べて簡単に数理モデルを得ることが可能となりました。実際にはMATLABでのシミュレーションによって、その高精度なモデル化が確認されています。
期待される応用
この研究は、マルチレートセンサ系の数理モデル化にも応用が期待されています。特に、入出力の実データを直接取得できない場合でも、この手法を用いることで高精度な数理モデルを得ることが可能となります。数理モデルが提供されることで、工業分野や科学技術分野での様々な設計理論にも応用できる可能性があり、研究の幅を広げると同時に技術力の向上も期待されます。
結論
熊本大学によるこの新しい理論は、周期時変システムの数理モデル化に関する従来の課題を克服するものであり、今後の技術開発において重要な貢献を果たすでしょう。自動運転技術やロボット制御の分野においても、この理論が持つポテンシャルは計り知れません。この研究成果により、より高精度な制御システムの実現が期待されます。
さらに詳細な情報については、下記の論文を参照してください。
論文名: Cyclic Reformulation Based System Identification for Periodically Time-varying Systems
著者: 岡島寛、藤本悠介、奥宏史、近藤晴人
掲載誌: IEEE ACCESS
URL: IEEE Xplore

会社情報
- 会社名
- 国立大学法人熊本大学
- 住所
- 熊本県熊本市中央区黒髪2-39-1
- 電話番号
- 096-344-2111
トピックス(科学)

【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。