
四足歩行ロボットがトンネル工事の安全性を向上させる新技術




四足歩行ロボットの自律探査技術
トンネル工事の現場では、作業員にとっての安全確保が最優先されています。そんな中、株式会社鴻池組と株式会社ポケット・クエリーズが手を組み、四足歩行ロボットによるトンネル工事の危険なエリア観察を実現する取り組みを発表しました。このロボットは、自律的に危険エリアを探査し、リモートで状況を監視することができるのです。
自律歩行ロボットの実証実験
この実証実験は2026年2月8日に実施されました。山岳トンネル工事における掘削面の安全観察を目的とし、ロボットが無人での探査を行いました。実験の結果、ガス検知や周囲の環境データの取得が可能であることが確認されました。この技術によって、作業員の危険を避けながらも、必要なデータを収集することができるようになったのです。
トンネル工事の課題
山岳トンネル工事は、その特異な環境から様々なリスクが存在します。地盤の不安定さ、落石、可燃性ガスの湧出など、作業員に対する危険性は非常に高いです。鴻池組とポケット・クエリーズは、これらのリスクを軽減するために、四足歩行ロボットを使った観察システムを開発してきました。これにより、より正確な観察が可能となります。
ロボットの作業プロセス
実験においては、以下のような流れでロボットが作業を進めます。
1. 発進基地から発信し、周辺環境をスキャンし、障害物の位置を三次元データとして記録します。
2. 取得したデータを元に、障害物を避けながらトンネルの先端へ自律的に歩行します。
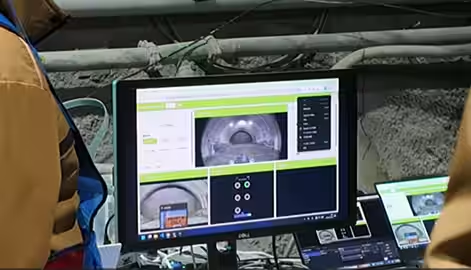
3. 設定された地点で自動停止し、掘削面の観察と環境データの収集を行います。
4. 環境データの収集が終了後、記録した経路を辿って発進基地に戻ります。
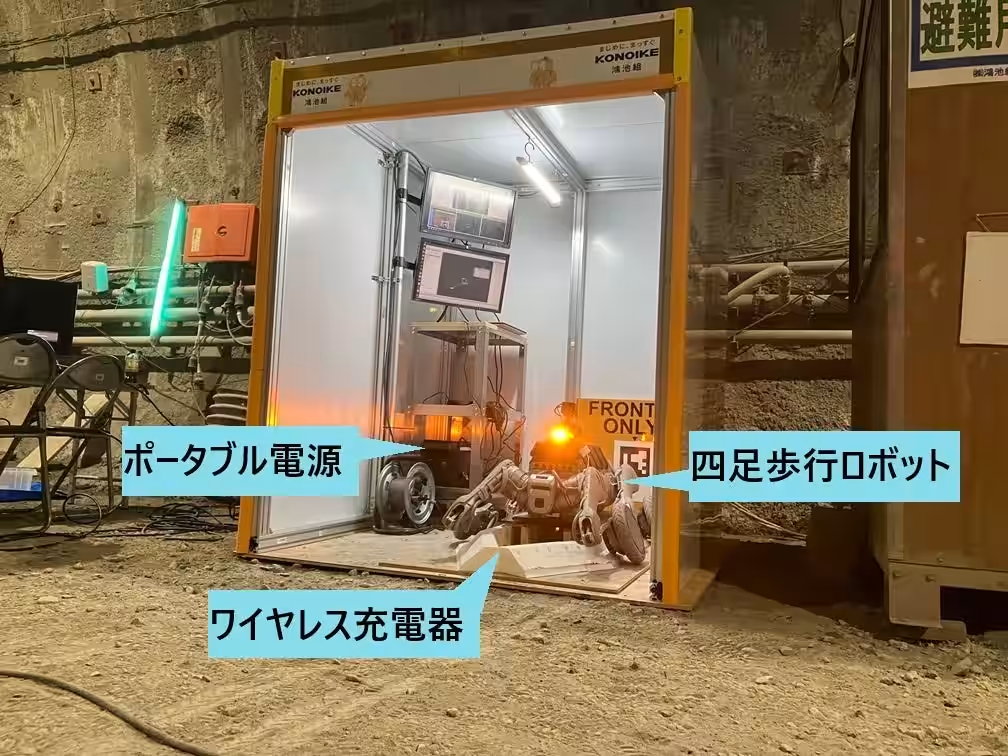
この一連の流れによって、ロボットは充電機能を備えた基地で常に運用可能な状態を維持します。
使われる機器
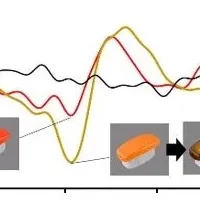
使用されたのは、Unitree社製の四足歩行ロボットB2-Wです。このロボットは多様な環境を検知するセンサーを搭載しており、カメラを使った遠隔観察や、様々なガスの検知も行えます。具体的には、3D LiDARを使い、障害物の検知を行う他、ガスセンサーによる濃度測定も行なっています。
実験結果
トンネル工事、最深部からの15メートル地点で停止後、掘削面の観察が行われました。その結果、風化した地形や湧水の有無、ガスの検知に成功しました。この結果は、従来の目視観察と同等の精度を保ちながら作業員の安全性を高めることができる可能性を示しました。
今後の進展
この技術の普及が実現されると、地山崩壊時における調査や、より複雑な地形条件への適用など、さらに広範囲での利用が期待できます。鴻池組とポケット・クエリーズは、このプロジェクトを通じて、山岳トンネル工事の安全性と効率性を向上させることに貢献する意向です。
まとめ
四足歩行ロボットによる安全なトンネル工事の実現は、建設業界において新たなスタンダードを打ち立てる可能性を秘めています。これからの技術革新に注目が集まります。


会社情報
- 会社名
- 株式会社鴻池組
- 住所
- 大阪府大阪市中央区北久宝寺町3-6-1(本町南ガーデンシティ)
- 電話番号
- 06-6245-6500
トピックス(科学)



【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。