



IR-UWBを活用した自律走行ロボットシステムの革新技術
自律走行ロボットシステムの革新
国立研究開発法人情報通信研究機構(NICT)と株式会社テクノ菱和は、最新の技術で自律走行ロボット(AMR)の制御を革新しました。このシステムは、インパルス型超広帯域無線(IR-UWB)を活用しており、従来の手法に比べて大幅な効率化が実現されています。
従来システムの課題
従来の自律走行システムでは、LiDARセンサとSLAM技術を用いるのが一般的でしたが、クリーンルームの環境ではこれらが有効に機能しないことが多く、特に鏡面のある環境では誤作動を引き起こすリスクがありました。そのため、磁気テープやカラーテープを利用した方法も清浄度低下の原因となるため使用できず、限られた条件下での作業が求められてきました。
新技術の導入
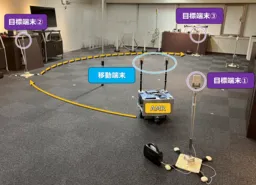
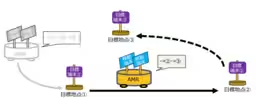
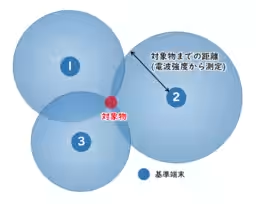
今回開発されたIR-UWB技術は、高精度な距離計測を行うことで、事前の地図作成や座標設定を省略することを可能にしました。目標地点とAMRに設置されたIR-UWB端末同士の通信により、リアルタイムで距離を測定し、自律走行を可能にしています。このシステムによって、ポータブルなIR-UWB端末を目標地点に配置するだけでAMRが自動で走行できるようになるのです。
利用ケース
具体的な利用ケースとしては、クリーンルーム内での環境測定が挙げられます。測定地点にIR-UWB端末を設置することで、自動的に気中微粒子濃度を測定し、従来は不可能であった測定時間の柔軟さを実現できます。これにより、日中の作業時間に別の作業を配置し、夜間や休日に測定を行うことが可能になります。また、人間による発塵の影響が少ないため、より正確な清浄度の測定ができ、作業効率の向上にも寄与します。
今後の展望
この自律走行システムは、今後のさらなる発展も期待されています。IR-UWBによる距離計測を基に、目標地点推定部とAMR駆動制御部が連携し効果的に制御される様子が見受けられます。今後は、これらの制御を一体化することで、さらなるシステム小型化および制御効率の向上を目指すとのこと。本システムは、2025年に開催される「NICTオープンハウス」での展示が予定されているため、多くの関係者がその発展を注目しています。
この画期的な技術は、今後も計測、物流、建築現場など多岐にわたる分野での自律作業ロボットの普及が期待されており、業務の効率化と精度向上に繋がるでしょう。

会社情報
- 会社名
- 情報通信研究機構 広報部
- 住所
- 電話番号
トピックス(IT)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。