




商用5Gで実現したロボットの新たな遠隔操作技術の成功
商用5Gでの革新技術がもたらす未来のロボット操作
近年、通信技術の進化とともにロボット工学も急速に発展しています。その中で、株式会社NTTドコモと慶應義塾大学が手を組み、商用5Gを活用したロボットの高精細な無線遠隔操作に成功したというニュースが飛び込んできました。本記事では、その実証実験の内容や意義について詳しく解説します。
1. 実証実験の背景
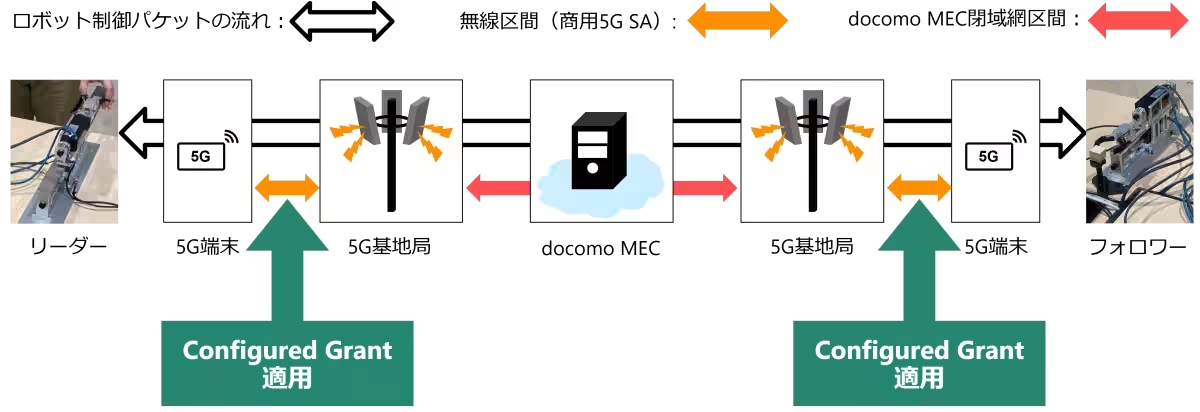
このプロジェクトでは、低遅延スライシング技術の一つであるConfigured Grantを導入し、特に商用5Gの通信基盤を活用しました。慶大の開発した「リアルハプティクス®」という技術は、物体に触れた際の手応えを高精細に再現します。この技術を用いることで、遠隔地にいる操作者が繊細な力加減を持ってロボットを操作できるようになります。
2. 通信遅延との戦い
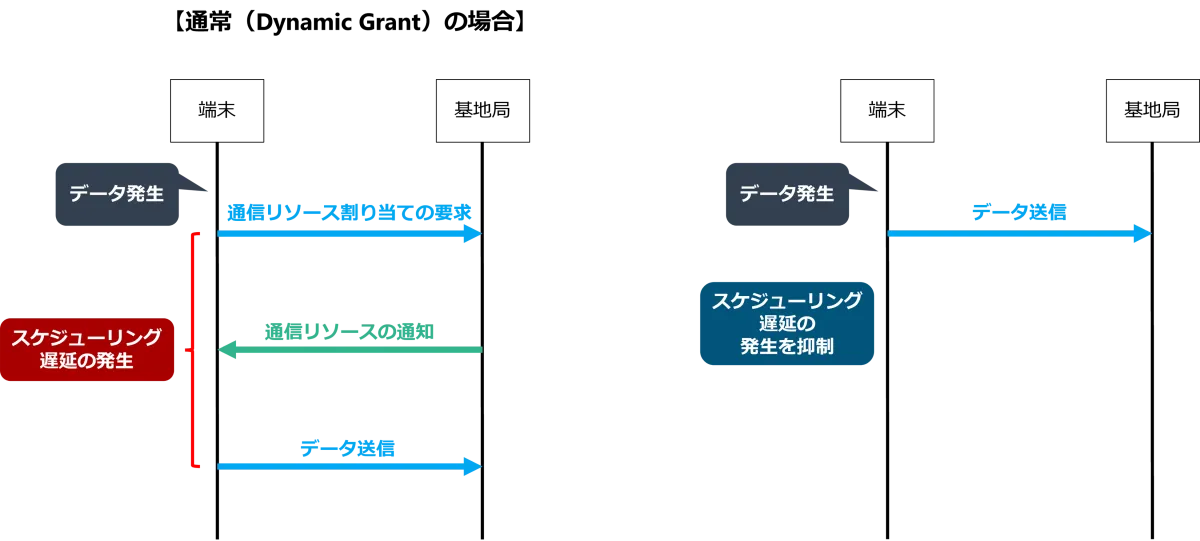
遠隔操作において、通信の遅延は大きな課題です。モバイルデータ通信の遅延やその変動が大きいために、ロボット同士の動作が同期しないことが多々あります。これが、操作の精度や安定性に悪影響を及ぼす要因です。そこで、Configured Grantを利用して、この遅延の改善を目指しました。
3. 成果と検証
印象的なことに、本実証ではConfigured Grantの導入によって、リーダーとフォロワー間の通信遅延が大幅に改善されることが確認されました。具体的には、リアルハプティクスロボットの実用的な遠隔操作に求められる通信遅延の要件をクリアし、手応えの再現性や操作性が向上したという結果が得られたのです。
3.1 実験方法
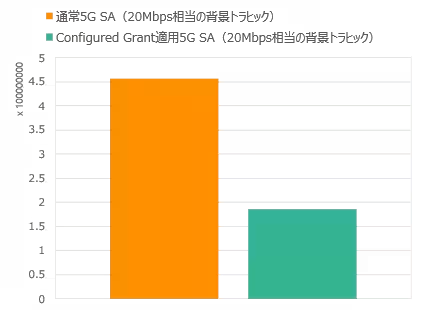
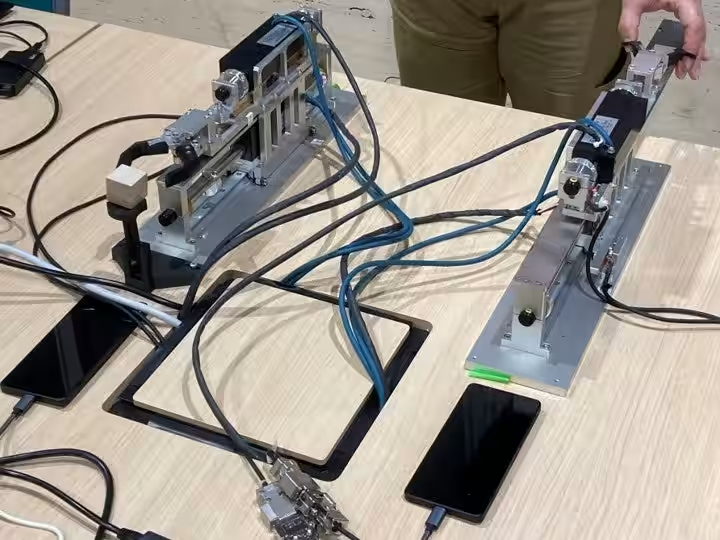
実験では、操作用ロボットが実際に物体を把持し、その操作を行うための一連のタスクが設定されました。Configured Grantを適用した場合と、従来の5G SAを使用した場合とで、両者の操作性を比較しました。設定されたタスクは、力加減を変化させながら物体を運搬するというものでした。
3.2 結果
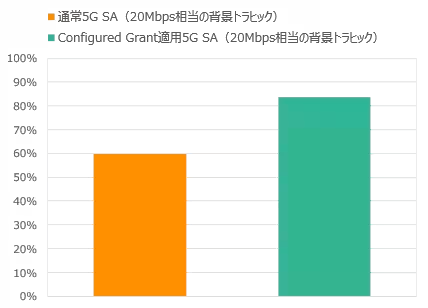
実験の結果、Configured Grantを用いた場合、通信遅延の平均値は大幅に低下し、遅延の変動を示す標準偏差も減少しました。特にリアルハプティクスにおける力触覚再現率は従来比で40%向上し、滑らかさに関する指標も59%改善されました。これにより、操作のガタツキが抑制され、より精密な操作が可能となります。
4. 今後の展望
この成功は、今後のロボット技術の応用範囲をさらに広げるものです。NTTドコモと慶大は、引き続きロボットの無線遠隔操作に関する技術開発と実証を進めていく予定であり、2026年3月にはスペインで開催されるMobile World Congressで成果を展示する計画です。
結論
商用5Gによるロボットの高精細遠隔操作は、通信技術の発展と共に新たな可能性を切り開いています。未来の働き方や生活様式におけるロボットの役割は、今後ますます重要になるでしょう。この分野の研究と技術開発に期待が寄せられます。
会社情報
- 会社名
- 株式会社NTTドコモ
- 住所
- 東京都千代田区永田町2丁目11番1号山王パークタワー
- 電話番号
トピックス(IT)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。