月面無人建設へ向け、Panasonicと大成建設がSLAM自動運転技術開発で継続採択




月面無人建設に向けた革新的技術開発:パナソニックと大成建設がSLAM自動運転技術で新たな一歩
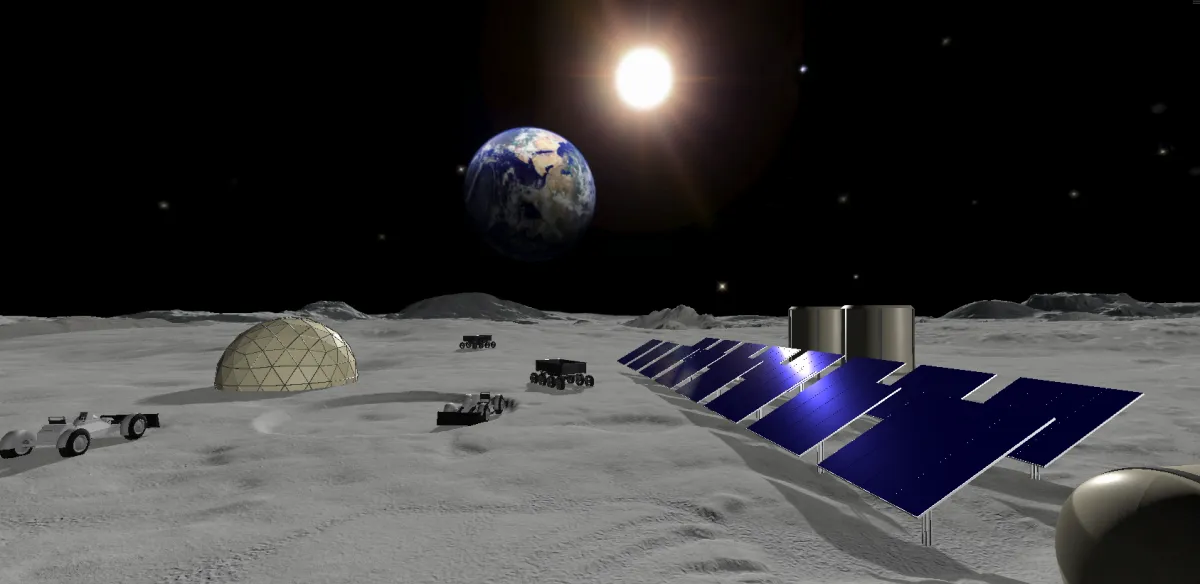
パナソニックアドバンストテクノロジー株式会社と大成建設株式会社は、国土交通省の「宇宙無人建設革新技術開発推進事業」において、「月面適応のためのSLAM自動運転技術の開発」が継続採択されたことを発表しました。このプロジェクトは、月面における建設機械の自動運転技術実現に向けた重要な一歩となります。
月面建設の課題とSLAM技術
月面での建設作業は、地球上とは大きく異なる環境条件によって、多くの困難が予想されます。まず、GPSなどの測位衛星からの信号を受信できないため、建設機械の位置を正確に把握することが困難です。さらに、未踏の地形や極端な温度変化なども、作業の複雑さを増す要因となります。
この課題を克服するために、両社はSLAM(Simultaneous Localization and Mapping)技術に着目しました。SLAM技術は、センサーからの情報を利用して、ロボット自身の位置を推定しながら同時に周囲の地図を作成する技術です。本プロジェクトでは、LiDAR(Light Detection And Ranging)センサを用いたLiDAR SLAMと、人工的なランドマーク(目印)を用いたランドマークSLAMを融合させることで、月面のような特殊な環境下でも高精度な位置推定と地図作成を実現することを目指します。
LiDAR SLAMとランドマークSLAMの融合
LiDAR SLAMは、レーザーセンサを用いて周囲の3次元形状を計測し、その情報を基に自己位置を推定します。暗所や遠距離でも高い精度を誇る一方、周囲の環境に立体物が少ない場合、位置合わせが困難になるという弱点があります。
一方、ランドマークSLAMは、あらかじめ配置したランドマークを基準として位置を推定します。立体物が少ない環境でも精度を維持できることが強みです。
本プロジェクトでは、LiDAR SLAMとランドマークSLAMそれぞれの強みを活かすことで、月面環境における建設機械の安定した自動運転を目指します。
シミュレーションと実証実験
高度な自動運転技術の開発には、現実空間での実験だけでなく、シミュレーションも不可欠です。両社は、NASAなどが公開しているデータなどを活用し、月面環境を仮想的に再現したシミュレーション環境を構築。この環境を用いて、センシング技術や自動運転アルゴリズムの開発、評価、精度向上を図ります。
シミュレーションによる検証に加え、月面を模した地上での実証実験も計画されています。これにより、開発技術の現実空間への適用可能性を検証し、課題を洗い出していく予定です。
未来への展望
パナソニックアドバンストテクノロジーと大成建設は、この研究開発を通じて、月面建設だけでなく、地球上における建設現場の自動化・無人化にも貢献できる技術の確立を目指しています。将来的には、災害対応や少子高齢化社会における建設業界の課題解決に繋がる技術として期待されています。 本プロジェクトの成功は、宇宙開発における日本の技術力を示すだけでなく、地球上の社会問題解決にも貢献する可能性を秘めています。
会社情報
- 会社名
- パナソニック アドバンストテクノロジー株式会社
- 住所
- 大阪府門真市大字門真1006番地
- 電話番号
- 06-6900-9742
トピックス(科学)


【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。