
ヴイストンが研究用ロボット向けROS 2サンプルを拡充、開発の幅を広げる




ヴイストンが研究用ロボット向けROS 2サンプルを拡充
大阪に本社を置くヴイストン株式会社が、自社の研究開発用台車ロボットに対応するROS 2のサンプルを新たに追加しました。これにより、ユーザーはさらなる機能強化や自律移動、地図作成を通じて、さまざまな研究開発の可能性を広げられることを期待されています。
多彩な研究開発プラットフォーム
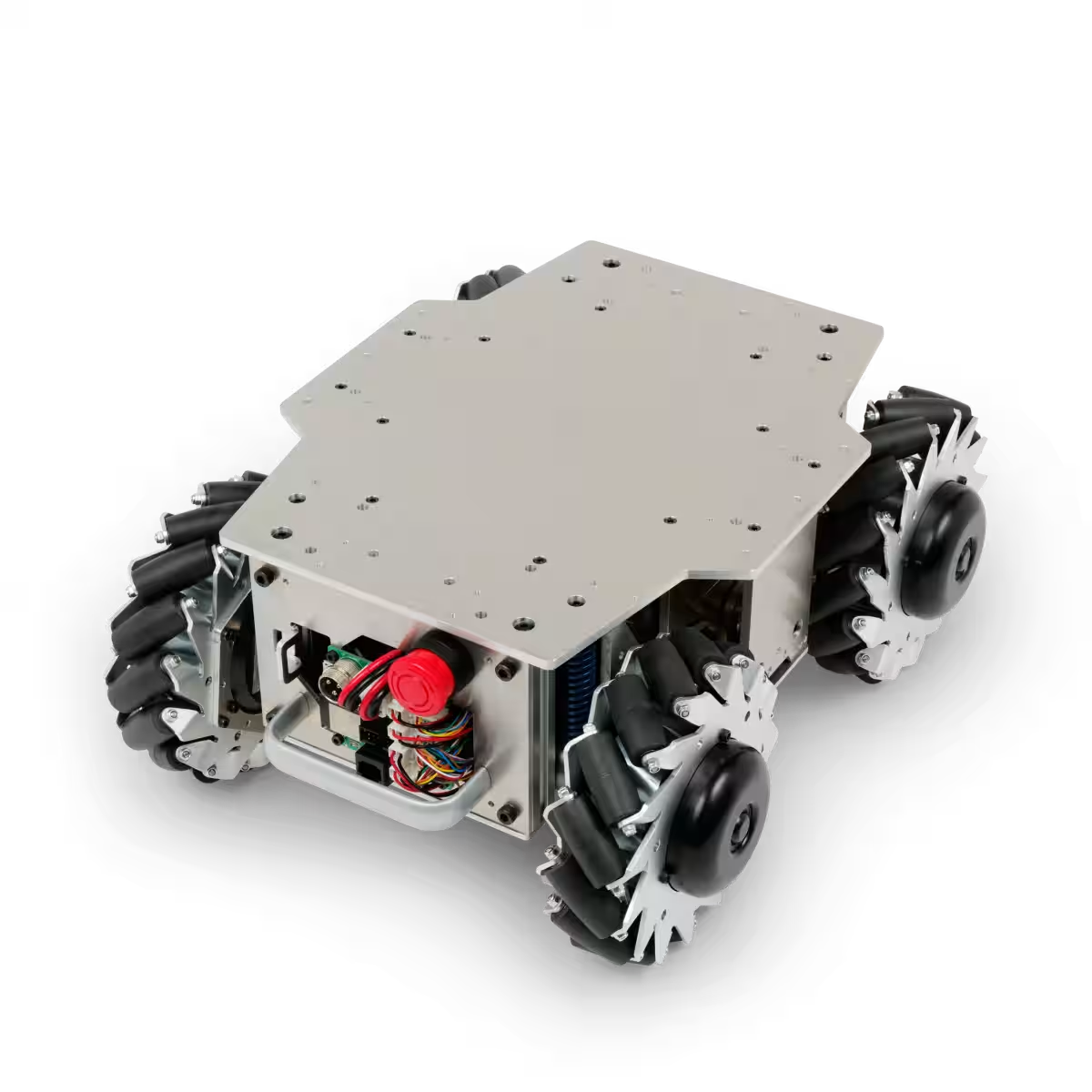
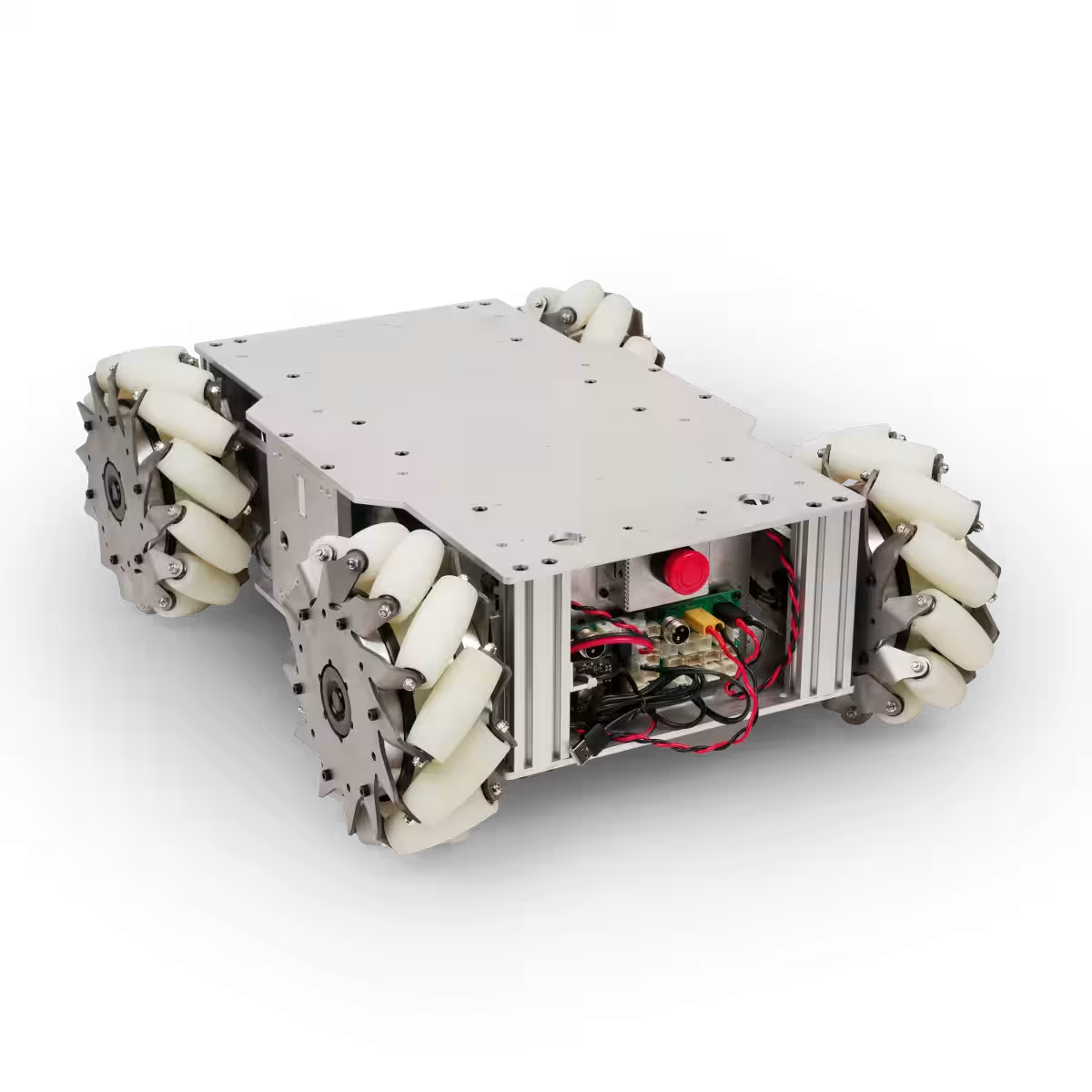
ヴイストンの研究開発用台車ロボットシリーズは、その多様性が特長です。異なる駆動方式や可搬重量を持つ複数の本体ラインナップが用意されており、ユーザーは目的に応じて柔軟な開発が可能です。Arduino IDE対応の制御基板や、ROS 2に対応したオプションデバイス、様々なセンサーオプションも揃えており、研究者や開発者にとって使いやすい環境が整っています。
ROS 2サンプルの追加
今回の追加は、特にROS 2 Humble用のサンプルパッケージに焦点を当てています。具体的には、次の3つの走行サンプルが提供されます。
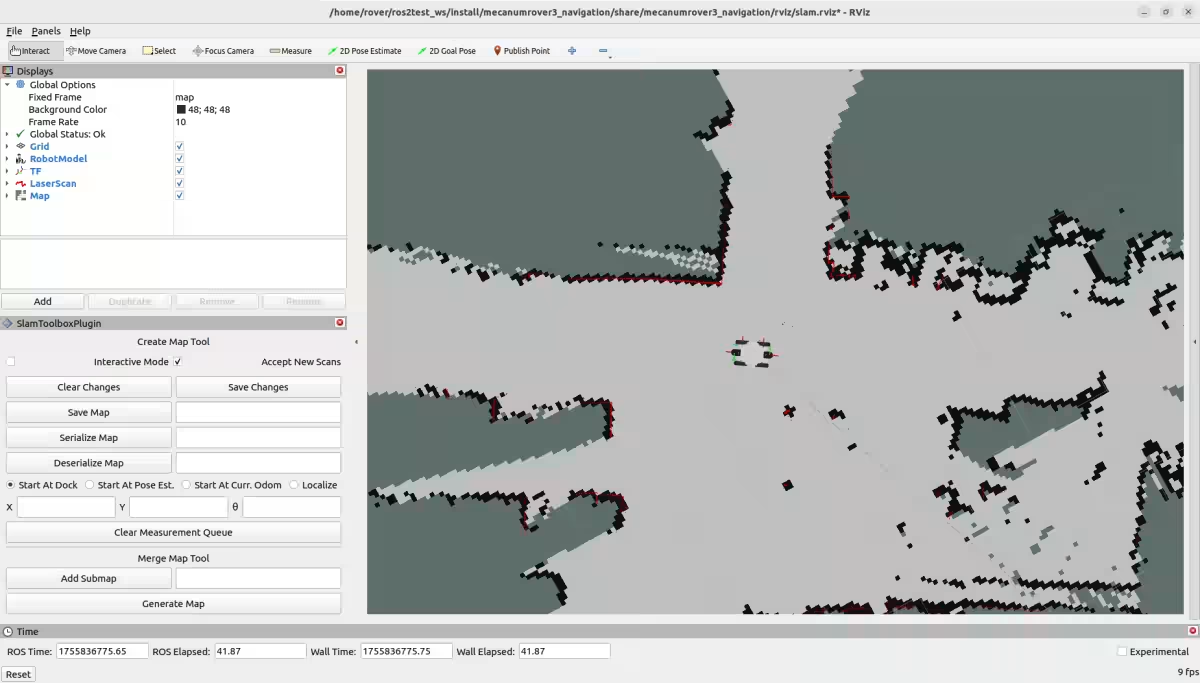
- - SLAMを用いた地図作成(SLAM Toolbox、gmappingの二種類)
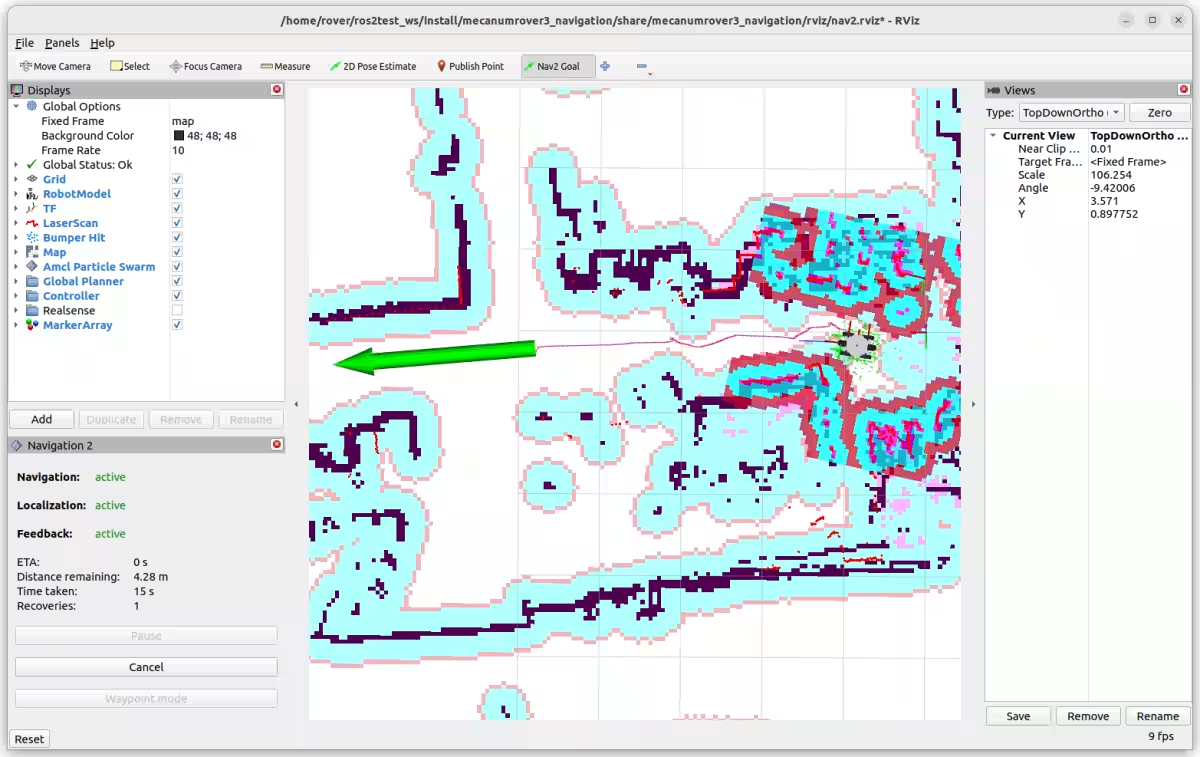
- - 自律移動に関する経路計画と障害物回避機能(Nav2の利用)
これらのサンプルは、すでに提供されているものに加えられ、ユーザーは無料でアクセスできる点も魅力です。さらに、SLAM機能を活用することで、台車ロボットは周辺環境の地図を作成し、より効率的な移動が可能となります。
自律移動機能の強化
加えて、追加された自律移動サンプルではLiDAR(LRF)情報やオドメトリを通じて、自己位置の推定や目標地点への自動移動が行えるように設計されています。これにより、ユーザーは指定した地点へと容易にロボットを移動させることができ、研究の進捗がサポートされます。
推奨環境と対応機種
これらの新しい機能を利用するためには、特定の推奨動作環境が必要です。OSにはUbuntu 22.04(64bit)、ROSにはROS 2 Humble、さらに強化されたCPUやRAMが必要とされています。また、対応機種も今後拡大予定で、スタートラインアップにはメガローバーシリーズやメカナムローバーシリーズが含まれています。
結語
ヴイストン株式会社の新しいROS 2サンプルパッケージの発表は、研究者や開発者にとって非常に有益な支援となることでしょう。特に自律移動機能やSLAM機能の強化は、ロボットを用いた研究の幅を広げ、実践的な応用が期待されます。このように、ヴイストンは技術革新を通じて、より多くの研究や開発活動を支援する姿勢を打ち出しています。今後も新しい技術の導入が待たれるところです。





会社情報
- 会社名
- ヴイストン株式会社
- 住所
- 大阪府大阪市西淀川区御幣島2-15-28
- 電話番号
- 06-4808-8701
トピックス(IT)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。