



大阪電気通信大がドローンの自己位置推定技術を進化させる新手法を発表
大阪電気通信大学の新たなドローン技術
最近、屋内におけるドローンの自己位置推定に関する新しい手法が発表され、多くの注目を集めています。この研究は、大阪電気通信大学の中原匡哉准教授を中心としたチームによるもので、オンラインジャーナル「Journal of Digital Life」に掲載されています。
この研究の背景には、警備業界の深刻な人手不足があります。近年、警備業務においても人材確保が困難になっており、これに対処するために自動化技術が求められています。その中でも、ドローンを利用した警備システムの開発は重要なテーマですが、屋内では環境特性により、位置推定が難しくなるという課題がありました。
課題と研究の焦点
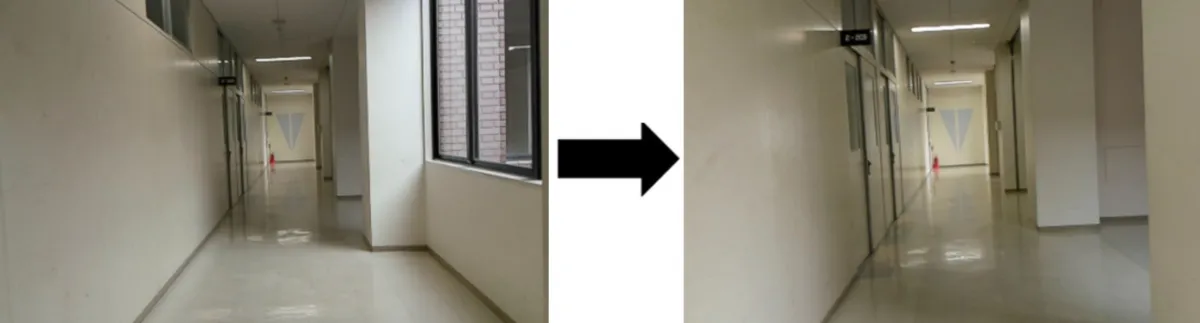
特に問題となるのは、無地の壁面が多い屋内での自己位置推定です。従来の特徴点を利用した手法では、取得できるデータが不足し、位置の推定が行き詰まります。このような状況を打破すべく、研究チームは新たなアプローチを考案しました。
新手法の提案
この新しい手法は、既存の特徴点ベースとは異なる要素を取り入れ、物体の動きによる環境の変化に柔軟に対応できる特徴を持っています。実証実験の結果、ドローンは巡回ルート上での位置を比較的正確に推定できることが確認され、提案した技術が従来の問題を克服する可能性が見えてきました。
今後の展望
研究チームは、さらに技術の向上を目指しており、今後はガンマ補正などを活用し、照明の条件が厳しい状況でも効果的に機能するよう改良を進める予定です。夜間などでも対応可能なこの技術の開発を目指し、研究は続けられることになるでしょう。
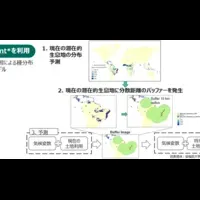
また、この研究の重要なポイントは、得られたデータをもとに、深層学習を用いた画像生成技術を活用することで、悪影響を及ぼす環境光の変化に対応することが可能だという点です。これにより、夜間にも適応した実用的なドローン運用が期待されます。
まとめ
「Journal of Digital Life」では、デジタル技術に関する様々な研究が発信されており、今回の研究もその一環として非常に重要な位置を占めています。この新たな技術がもたらす可能性に期待が寄せられています。今後の動向に注目が集まる中、研究者たちが日々進化を続け、より使いやすい技術が提供されることが期待されます。
論文に関する詳細は、こちらから確認できます。

会社情報
- 会社名
- 株式会社産経デジタル
- 住所
- 東京都千代田区大手町1-7-2東京サンケイビル13階
- 電話番号
- 03-3275-8632
トピックス(科学)

【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。