




革新的なドローンとAIで進化する下水道点検技術の未来
革新的なドローンとAIで進化する下水道点検技術の未来
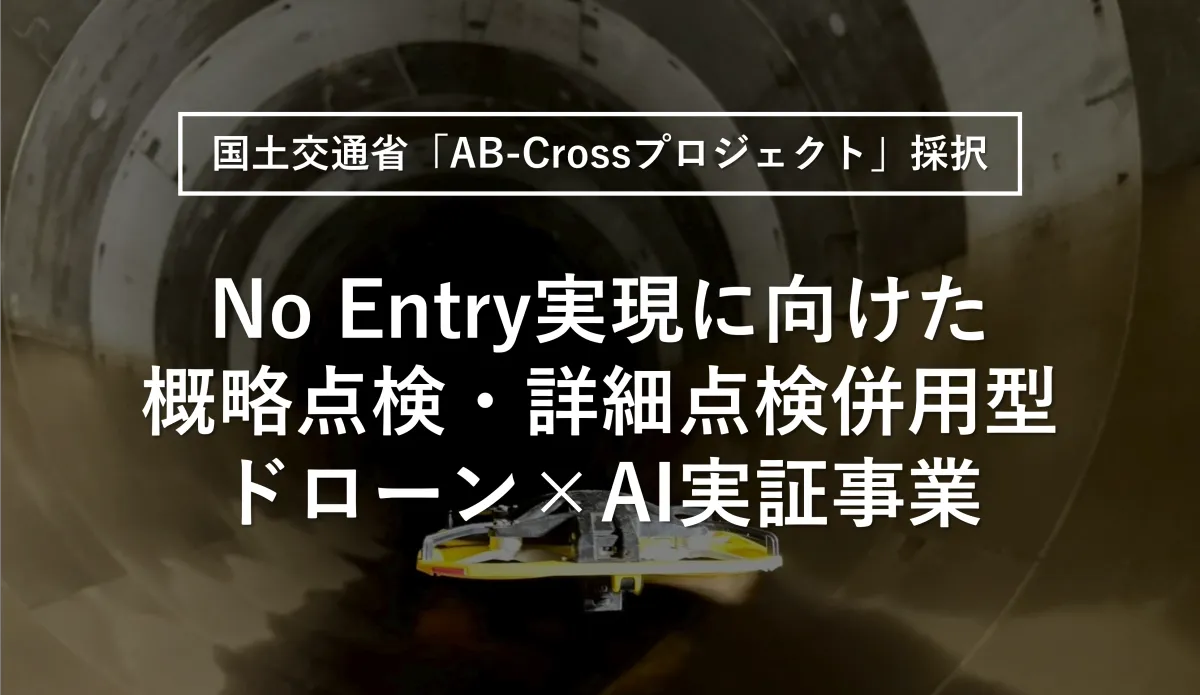
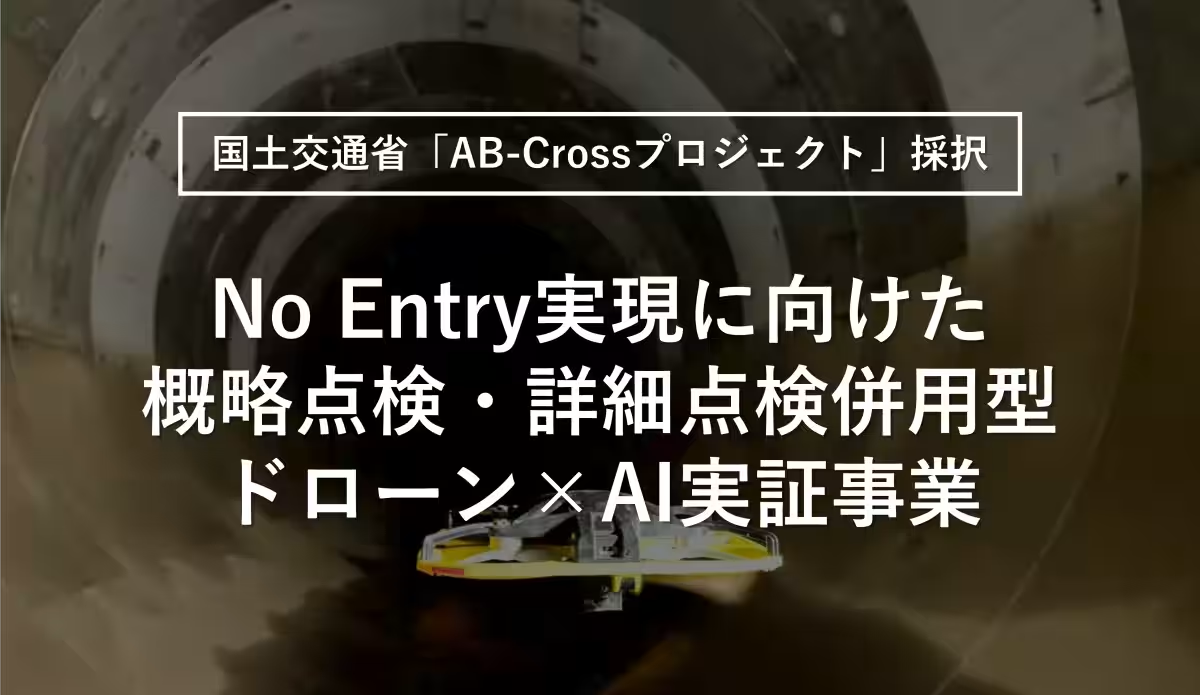
最近、国土交通省による「AB-Crossプロジェクト」が採択され、下水道の点検技術が根本から変わろうとしています。このプロジェクトには、千葉市を含む複数の企業が参加し、特に注目すべきは株式会社Liberawareが開発したドローン「IBIS2」です。このドローンは、従来の点検方法では難しかった下水道管路の狭い空間や高水位での点検が可能になります。
背景と課題
下水道の点検では、これまでの技術では映像による状態把握が中心でした。しかし、クラックの幅や劣化の進行状況を数値化することは難しく、異常箇所を高精度で特定する技術的制約がありました。このような課題を解決するために、ドローンとAIを融合させた新たな技術の導入が求められていました。
プロジェクトの目的
今回の実証事業では、「No Entry」という無人化・省力化を目指しています。これにより、従来の方法では危険が伴っていた人が入れない場所での点検を可能にし、クラック幅の定量計測や自己位置推定機能を高めることで、さらなる診断精度の向上を図ります。要するに、このプロジェクトは下水道管路の管理をより高度に、持続可能にするための技術基盤を構築することを狙いとしています。
技術的特徴
新たに提案された技術には以下の特徴があります。
- - 飛行型ドローン「IBIS2」: 高水位や狭小空間でも安定した飛行性能を発揮し、最大1,000メートルの航続距離を持ち、しかも防水・耐環境性能が強化されています。
- - 自己位置推定機能: 詳細な異常箇所の特定を可能にし、補修計画の精度も向上します。
- - AIによる定量診断: 劣化の判定がAIによって高度化され、点検品質が均質化されます。
- - 3次元解析: AIを活用して管内3Dモデルを生成し、管路の状態を可視化する技術が導入されます。
実証技術の内容
本プロジェクトでは、以下の実証技術の実装が予定されています。
1. 微細クラック(幅2mm)の安定的な数値化
2. 異常箇所特定の延長誤差を±5%以内に抑える
3. 最大1,000メートルまでの航続距離拡大
4. 治安問題のある狭小・高水位環境での飛行性能向上
5. 管内断面形状の定量把握機能の段階的実装
今後の計画
本プロジェクトには、二つのフェーズが設定されています。第一フェーズでは、千葉市内の実管路でドローンの性能を計測し、必要な改善点を特定します。第二フェーズでは、その改善点を基にさらに技術を進化させ、再度実証を行う予定です。
このプロジェクトは、下水道の点検・維持管理の進化を促進しますが、ただ効率を上げるだけではありません。危険な場所から人のリスクを排除するとともに、インフラの健康状態を適切に把握し、市民の安全を守るための挑戦です。
まとめ
下水道点検の「No Entry」実現は簡単なことではありませんが、今後の技術革新により、安全で効率的なインフラ管理の新たな時代が訪れるに違いありません。これからも、リベラウェアをはじめとした企業が、公共の安全と維持管理の向上に力を入れていくことが期待されます。
会社情報
- 会社名
- 株式会社Liberaware
- 住所
- 千葉県千葉市中央区中央3-3-1 フジモト第一生命ビル6階
- 電話番号
- 043-497-5740
トピックス(科学)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。