




自動運転時代の先駆け、公共領域向けダイナミックマップの開発
自動運転時代のインフラ整備を強化するダイナミックマップの開発
ダイナミックマッププラットフォーム株式会社(東京都渋谷区)が、内閣府の「BRIDGE」プログラムの下、2025年度の公共エリアに向けた自動運転の推進に取り組んでいる。これは、次世代のダイナミックマップの開発を進める大規模なプロジェクトであり、自動運転車両の社会実装を加速させる中核的な役割を果たす。近年の労働力不足の影響を受け、特に空港や港湾などの公共エリアにおける業務効率化が求められているなかで、同社は具体的な施策を進めている。
研究開発の進め方
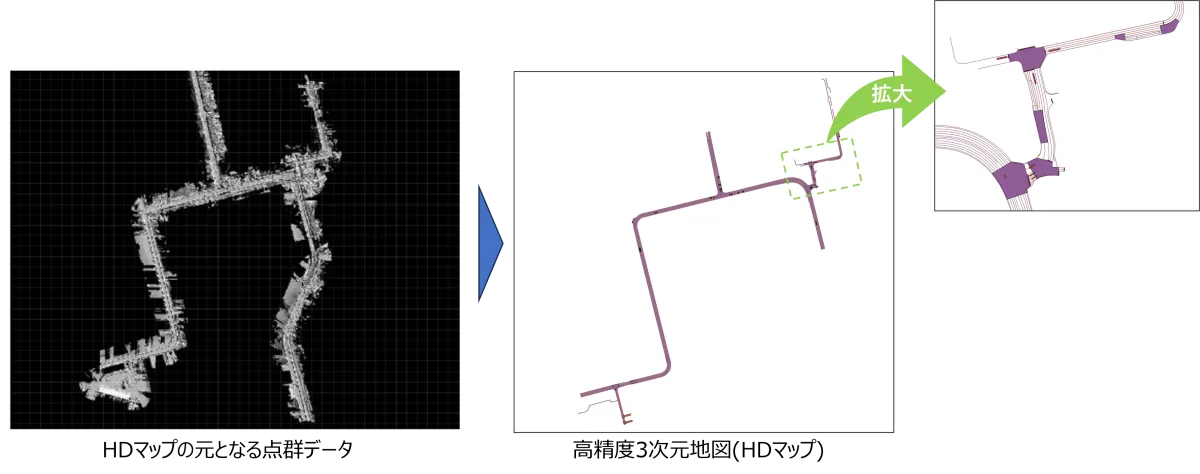
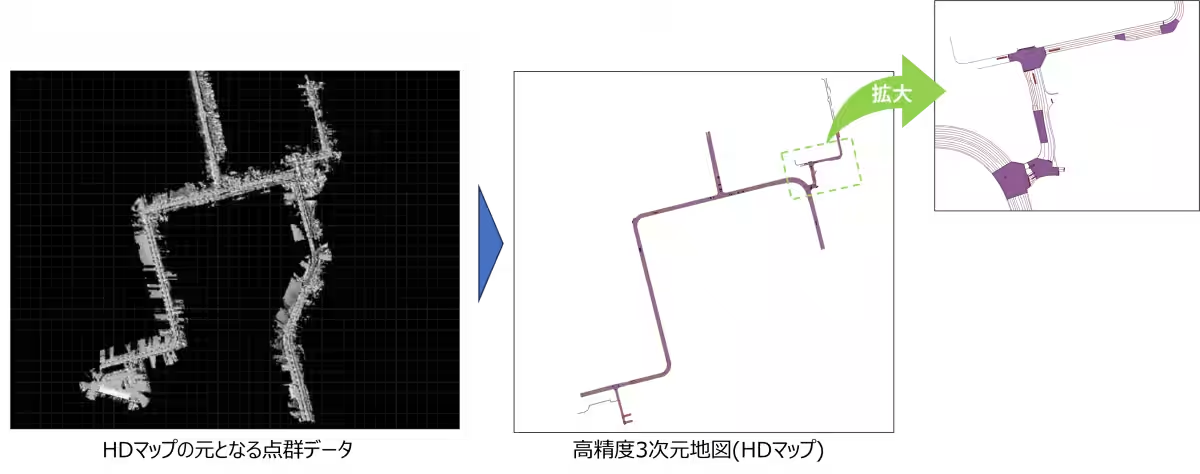
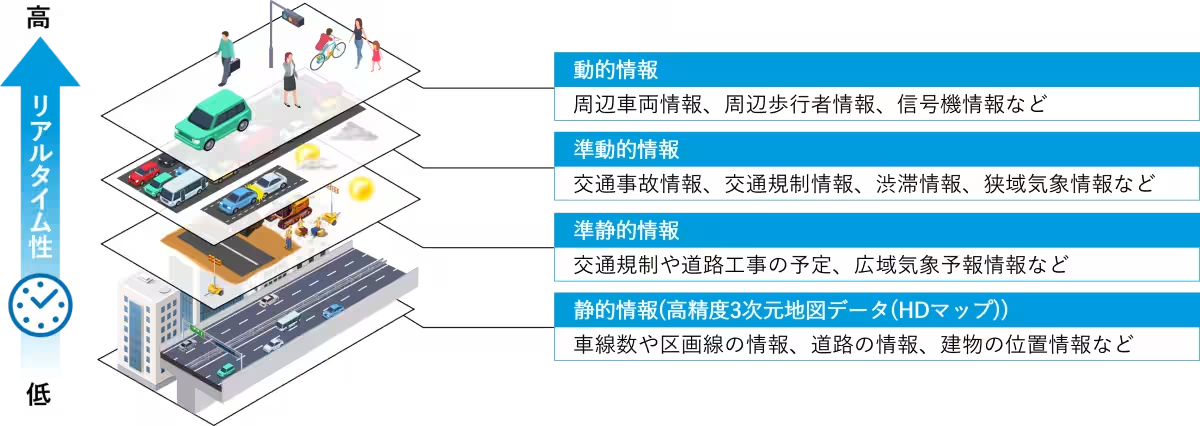
本格的な開発は2023年度からスタートし、次の年度までにHDマップ(高精度3次元地図)と未来の動的環境に対応するダイナミックマップの仕様策定を進めた。この地図データは、より直感的な自動運転を可能にするために、静的情報(HDマップ)と動的情報を統合し、リアルタイムで変化する環境に即応するという特徴がある。これにより、自動運転車両とその周囲の従業員双方にとって安全性と業務の効率化を図る仕組みの構築を目指している。
具体的な技術課題と取り組み
本プロジェクトでの具体的な取り組みは、以下の3つの技術課題に集約されている。
1. AI技術による情報統合
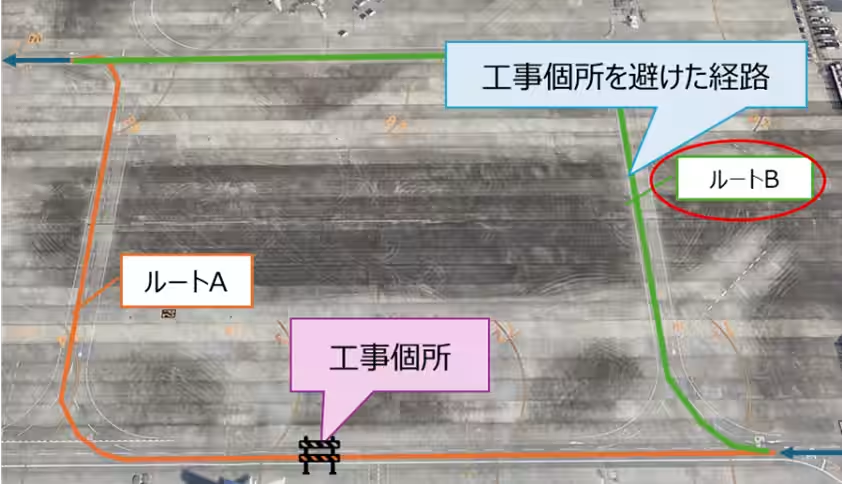
突発的な工事や障害物といった現場の動的状況をリアルタイムに把握し、これをHDマップ情報と組み合わせることで、自動運転車両が人間の判断に近い形で安全かつスムーズに動けるようにする。
2. 持ち込み可能な機材データによる地図の更新
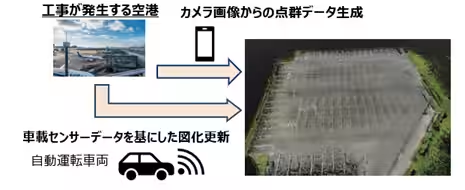
自動運転車両に搭載されたセンサーやカメラを活用して、立ち入りが制限されるエリアでも迅速かつ低コストで最新の地図情報を維持するプロセスを整備。これにより、公共エリアでの地図情報の更新が容易になることを目指す。
3. 実環境での自動運転車両の運用実験
空港や港湾での実証実験を通じて、これまでの技術が現実の職場環境で効果的に機能するかを検証。この実験では、工事情報など動的情報を基にした経路探索支援や安全な通行判断を確認する。
期待される影響と展望
この事業の成果は、単に公共エリアにとどまらず、一般的な公道での自動運転の基盤技術へと展開していく予定である。ダイナミックマップは未来の自動運転モビリティの柔軟かつ安全な運用を支える中核技術として位置づけられており、その発展が期待される。
日本国内だけでなく、国際的にも空港や港湾での自動運転への期待は高まっていることから、これらの技術が国際標準として認知され、世界的に展開される未来が見込まれている。日本発の地図技術が、世界のスマートモビリティを支えていく可能性は無限大だ。
結論
ダイナミックマッププラットフォーム株式会社による本事業は、公共エリアにおける次世代の自動運転技術の開発を促す重要な取り組みである。労働力不足が深刻化する中、現在の社会が抱える問題を解決し、便利で効率的な交通インフラの実現を工夫している。 これからの動きに目が離せない。
会社情報
- 会社名
- ダイナミックマッププラットフォーム株式会社
- 住所
- 東京都渋谷区渋谷2-12-4ネクストサイト渋谷ビル12階
- 電話番号
- 03-6459-3445
トピックス(IT)






【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。