




月面探査を変革する変形型ロボット「SORA-Q」の最新成果
変形型月面ロボット「LEV-2」SORA-Qが示した可能性
2024年1月、月面探査を目的とした変形型ロボット「LEV-2」、通称「SORA-Q」が月面に到達し、独自の技術を駆使して自律運用を実現しました。この度、彼の研究成果が国際的な学術誌「Science Robotics」に掲載され、宇宙探索の新たな時代が幕を開けています。特に注目すべきは、彼が自ら判断し移動、撮影、通信することができる自律制御技術を導入した点です。
1. 探査ロボットの背景
これまでの月や火星の探査においては、費用が高く大型のローバが用いられてきました。高機能である一方で、その開発や打ち上げには膨大なコストがかかり、多くの課題が残されていました。そのため、低コストで開発可能な小型ロボットが望まれるようになりました。しかし、小型ロボットは移動能力や処理能力、電力等に制約があり、実用化には様々な障壁がありました。特に月面の環境では、柔らかい地面に再現性を保持するための技術が求められました。
2. SORA-Qの革新性
LEV-2は直径約8cmの球体から展開して走行モードに移行します。このユニークな機構により、手のひらサイズでありながら月面を自在に移動できることを実証しました。また、遥か遠くからの操作に頼らず、自律的に行動を起こす能力を持っていました。これにより、厳しい宇宙環境でも効率良く動作することができ、新たな突破口を切り開いたのです。
3. 実証運用の成果
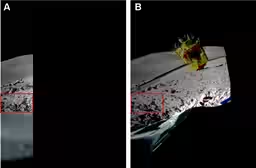
発表の中で、LEV-2が実際に月面で移動した際の2つの新しい画像も公開されました。自ら起動し、姿勢を整えてから安定した走行と画像撮影を行いました。さらに、撮影した画像の中から重要な情報を選別し無線でデータ送信するという全行動を自律的に実行したのです。これにより、どこでも自立して探査ができる小型ロボットの可能性が証明されました。
特に、得られた画像の中では、着陸機の周囲を明瞭に捉えられており、月面での貴重なデータを提供することに成功しました。この画像は、通信制約のある環境でも正確に動作する能力が確認された証でもあります。さらに、通信が途絶えた中でさえも、LEV-2は詳細なデータを取得でき、その機能性が裏付けられました。
4. 今後の展開
今後の宇宙探査に関して、LEV-2の成果は非常に重要な意義を持っています。今後の展開としては、とりわけ以下のような点が挙げられます。
- - 複数の小型ロボットを同時に運用し、効率的に広範囲をカバーする技術の発展
- - 大型ローバと小型ロボットの組み合わせによる柔軟な探査システムの樹立
- - 月や火星を越え、地下洞窟や急斜面といった難所での探査が可能となる
- - 低コスト・短期間でのミッション実現により、探査活動が加速される
これらの研究や技術の進展は、今後の宇宙探査に向け、我々人類の活動の幅を広げる重要なステップと言えるでしょう。今回の成果を経て、さらに新たな探査が経験豊富な科学者達と共に創り出されることを期待しています。
論文情報
本研究成果は「Science Robotics」にて公表され、DOIは10.1126/scirobotics.aec8039となります。タイトルは「From ball to rover: Transformable palm-sized rover SORA-Q for autonomous lunar exploration」です。この成功は、技術革新と探査の未来への新たな扉を開いた瞬間であります。


会社情報
- 会社名
- タカラトミー
- 住所
- 電話番号
トピックス(科学)







【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。