




フィジカルAIを駆使した自動収穫ロボットの検証が成功し期待が高まる
フィジカルAIを活用した自動収穫ロボットの成功に向けて
AGRIST株式会社は、AI技術を駆使した自動収穫ロボットの開発を進めています。その中で、Microsoft AI Co-Innovation Lab KOBEと協力し、フィジカルAIの開発検証を行いました。この取り組みは、実際の収穫現場で直面する課題を解決するための重要なステップとなることが期待されています。
自動収穫ロボットが抱える課題
これまでの農業現場では、自動収穫ロボットが環境要因により動作に支障をきたすことが多くありました。たとえば、「ヘタが隠れている」「障害物がある」などの状況では、ロボットアームが正確に対象にアプローチできなくなるのです。これにより、収穫の失敗や時間のロスが発生します。AGRISTはこうした課題に着目し、フィジカルAIを導入することで、より効率的な収穫を目指しています。
フィジカルAIの開発検証
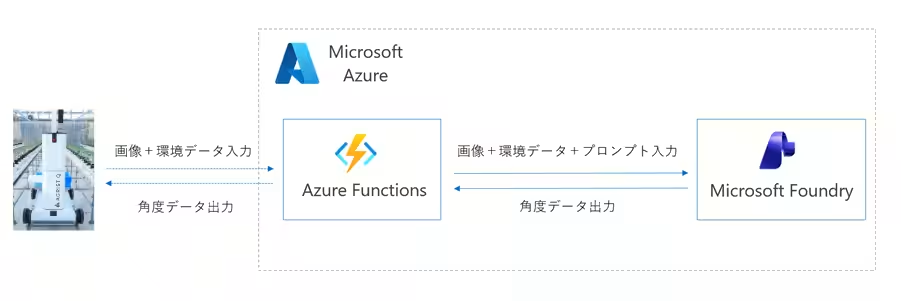
今回の開発検証では、生成AIを用いてロボット動作に必要な「回り込みの推奨角度」を算出し、Azure Functionsを介してこのデータをロボットに供給する一連のプロセスを構築しました。このアプローチにより、ロボットが障害物を避けながら適切に対象にアプローチできるようになります。
スプリント活動の内容
検証はスプリント形式で行われ、以下の主要な活動が含まれました:
1. 課題設定: ヘタ隠れや障害物による収穫の障害を洗い出す。
2. 目標設定: 自動収穫ロボットがAzure Functionsを通じて推奨角度を受け取り、動作に反映することを確認。
3. 実施内容: Microsoft Foundryを利用して生成AIの推論エンドポイントを構築し、必要なデータの前処理を行って形を整えました。これにより、ロボットが扱いやすいJSON形式のレスポンスを生成しました。
主な成果
この開発検証を通じて、いくつかの成果が得られました。生成AIが算出した角度データを利用して、自動収穫ロボットとの疎結合な接続が実現しました。また、応答速度も良好で、一定の精度感も確認できました。これにより、AGRISTは今後のフィジカルAIの運用に希望を持っています。
AGRISTの未来展望
AGRISTは、このフィジカルAI技術を利用することで、収穫性能を大きく向上させることができると信じています。これからは、実環境でのデータを積み重ね、さらに精度の高い評価方法を設計していく予定です。AIと自動収穫ロボットの連携は、農業の将来に新たな道を開くかもしれません。2050年を見据え、持続可能な農業を目指すAGRISTの挑戦は、今後も続いていくでしょう。
まとめ
今回は、AGRISTがフィジカルAIを活用した自動収穫ロボットについて、Microsoft AI Co-Innovation Labとの共同検証結果を紹介しました。今後、この技術が実用化されることで、農業現場に革新がもたらされることを期待しています。




会社情報
- 会社名
- AGRIST株式会社
- 住所
- 宮崎県児湯郡新富町富田東1丁目47番地1新富アグリバレー
- 電話番号
トピックス(IT)

【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。