




NECとNEXCO中日本、自動運転インフラ支援の実証実験を開始
NECとNEXCO中日本が共同で行う自動運転インフラの実証実験
日本電気株式会社(NEC)は、自動運転時代に向けた自動車とインフラの連携を強化するため、NEXCO中日本と協力し、E1A新東名高速道路にて路車協調の実証実験を行いました。これは、高速道路の安全性や快適性を向上させることを目的としており、2024年の夏に実施されました。
実証実験の概要
実証実験は、橋梁やトンネルを含む約3.1kmの区間で行われた。NECが参加したこのプロジェクトでは、国土交通省や他のNEXCO各社と連携し、将来的に自動運転トラックが安全に走行できるインフラ支援の仕組みを検証します。
路車協調とは?
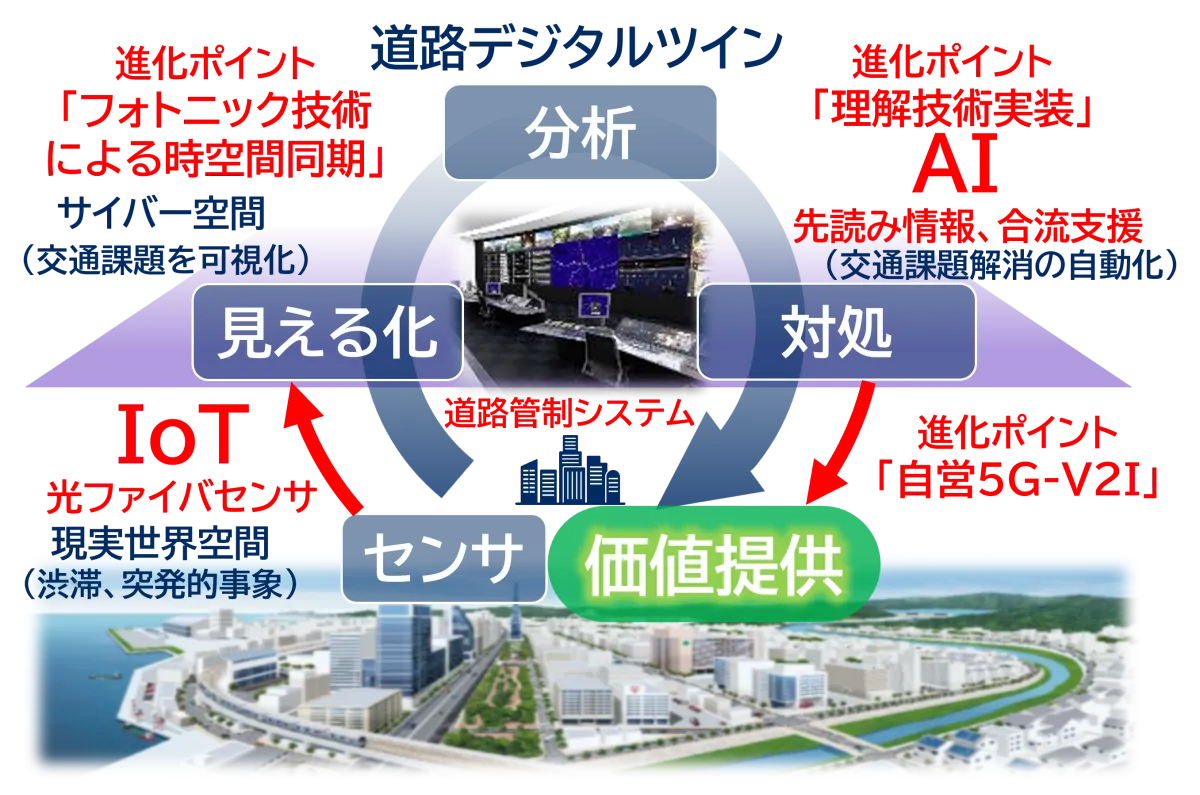
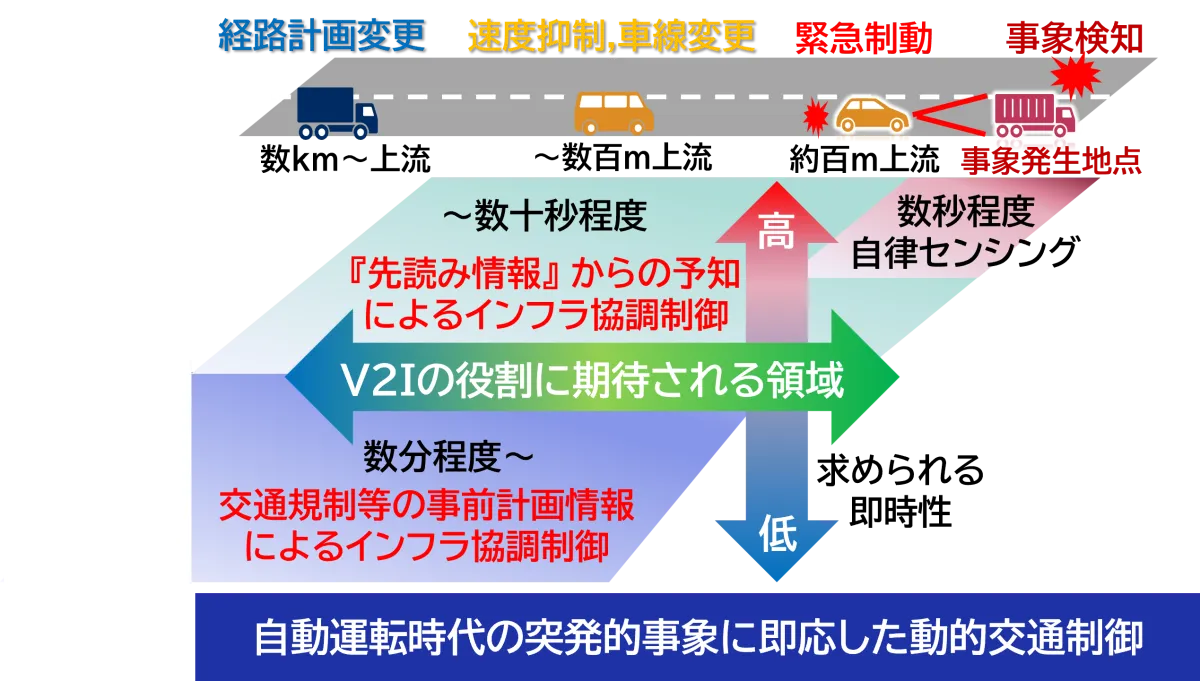
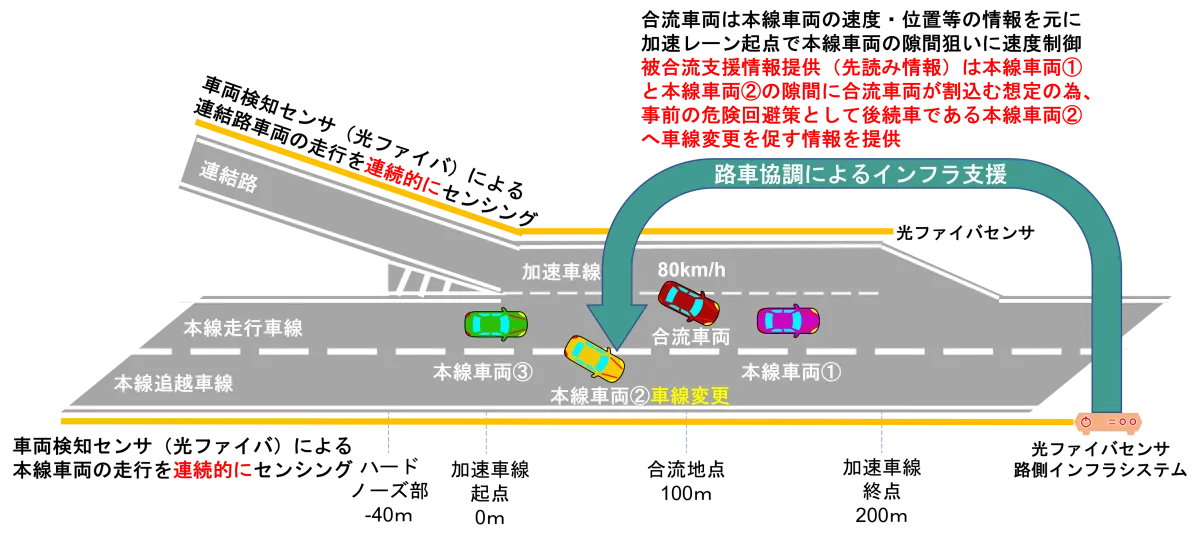
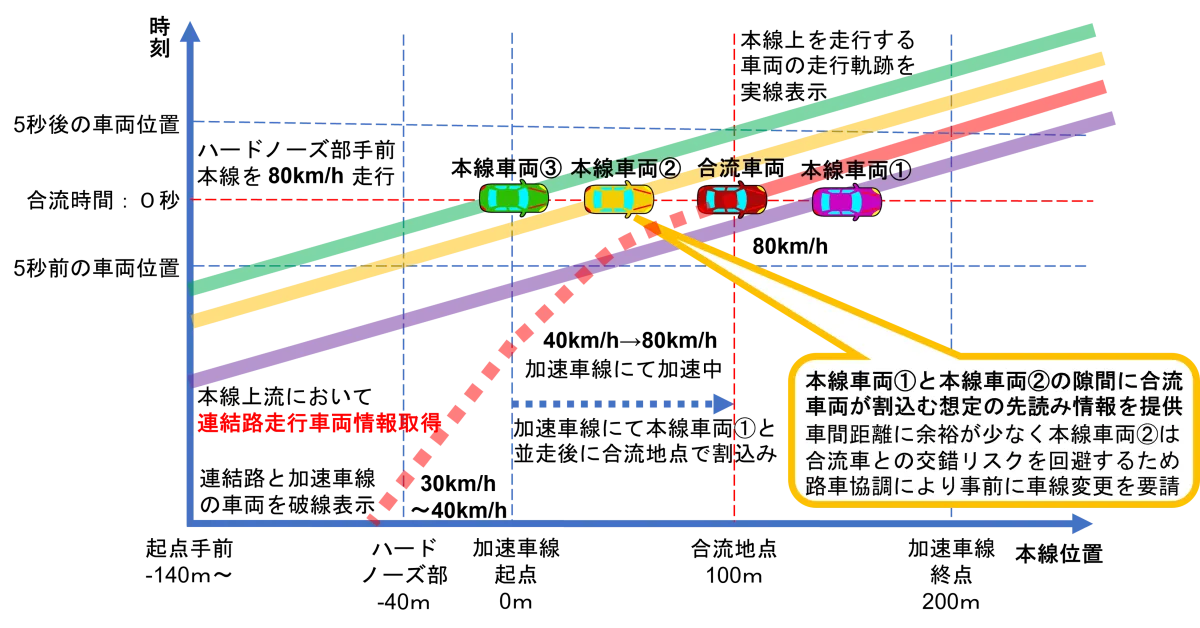
路車協調は、高速道路のインフラから提供される情報を元に、車両が自己判断だけではなく、周囲の状況を把握してスムーズに走行できるようにする仕組みです。具体的には、自動運転車が予測困難な状況、例えばインターチェンジやジャンクションでの非コネクテッド車との交錯リスクや突発的な交通事故を早期に認識できるような情報提供が求められています。
実施されたテクノロジーの詳細
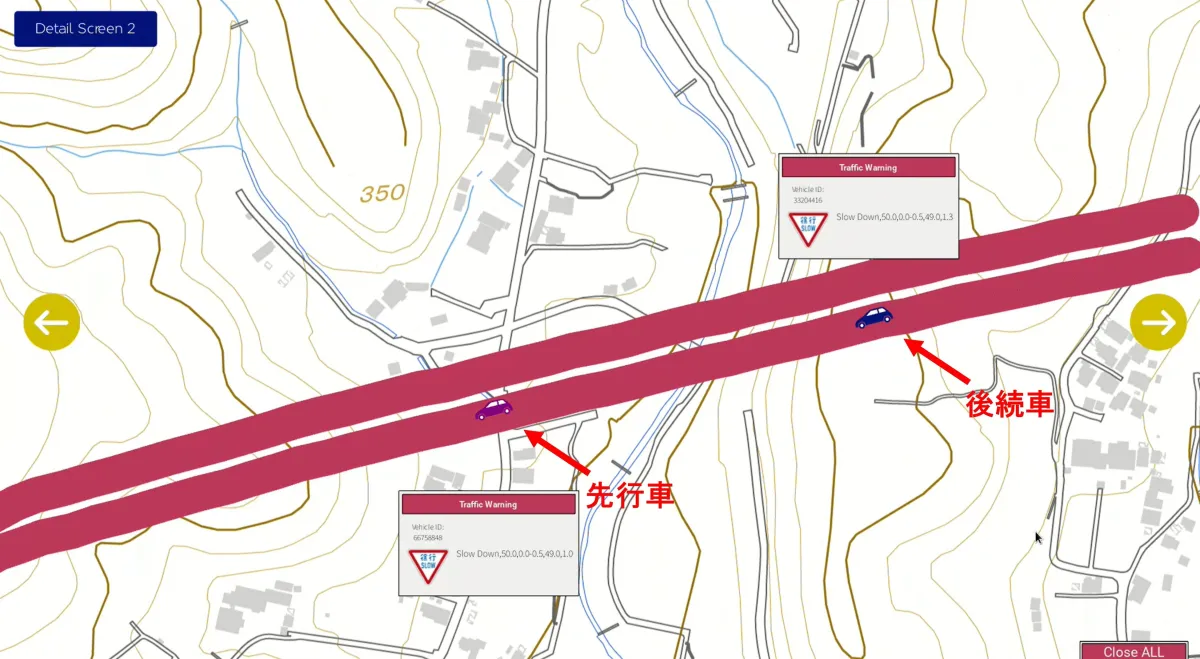
今回の実証実験では、NECが独自に開発した「デジタルツイン技術」が活用されています。この技術により、実道路上での交通状況をリアルタイムに把握し、動的な交通管理が可能になります。特に重要なのは、事象発生から情報提供までのタイムラグが従来の15分から数秒に短縮されたことです。これにより、自動運転車が即時に行動を調整できる体制が整いました。
また、実験において、高速道路での5G通信を用いた「路車間通信機能(V2I)」が導入されています。この機能は、車両が道路インフラから受け取る情報の連続性を高め、交通状況に応じた情報提供が可能となります。
具体的なユースケース
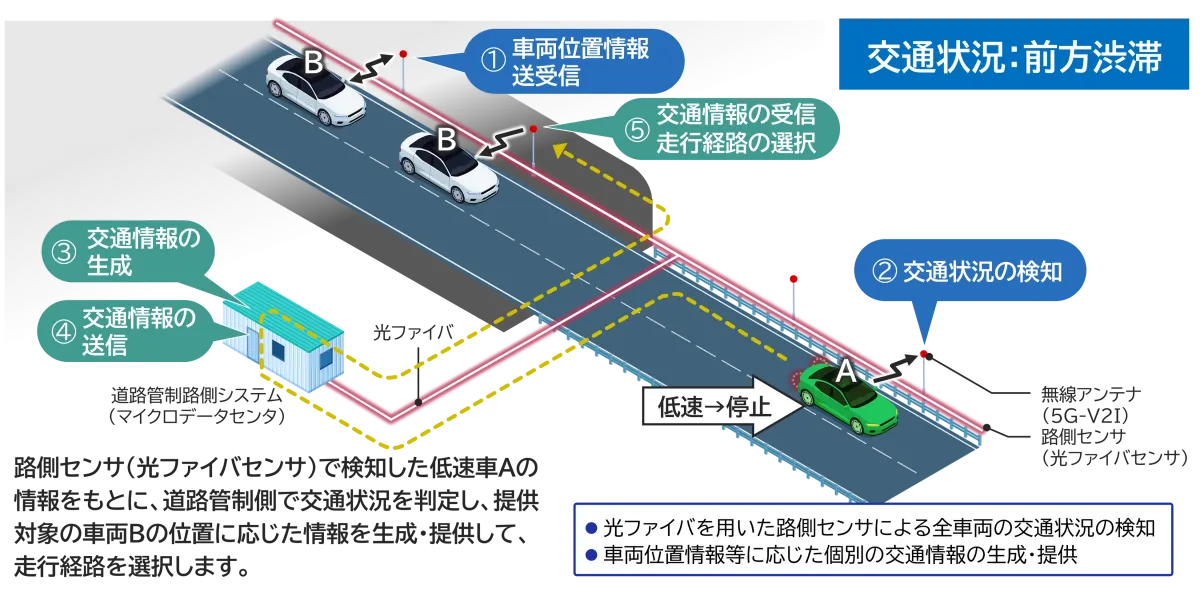
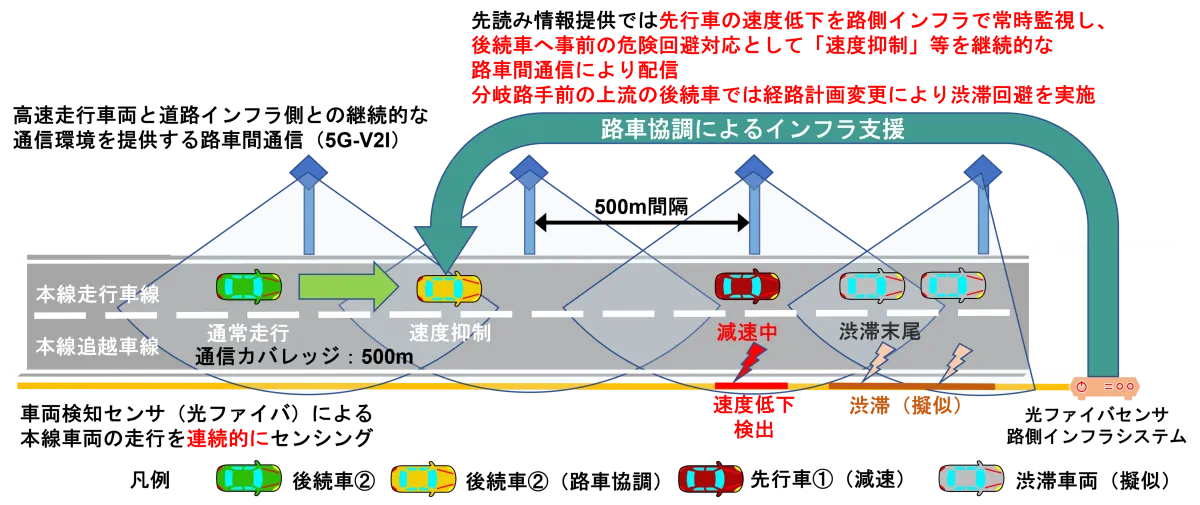
実証実験では、2つの主要なユースケースが測定されました。1つは「交通状況に応じた情報提供による高速道路ネットワークの最適化」で、渋滞情報をリアルタイムで収集し、後続車両に提供するものです。
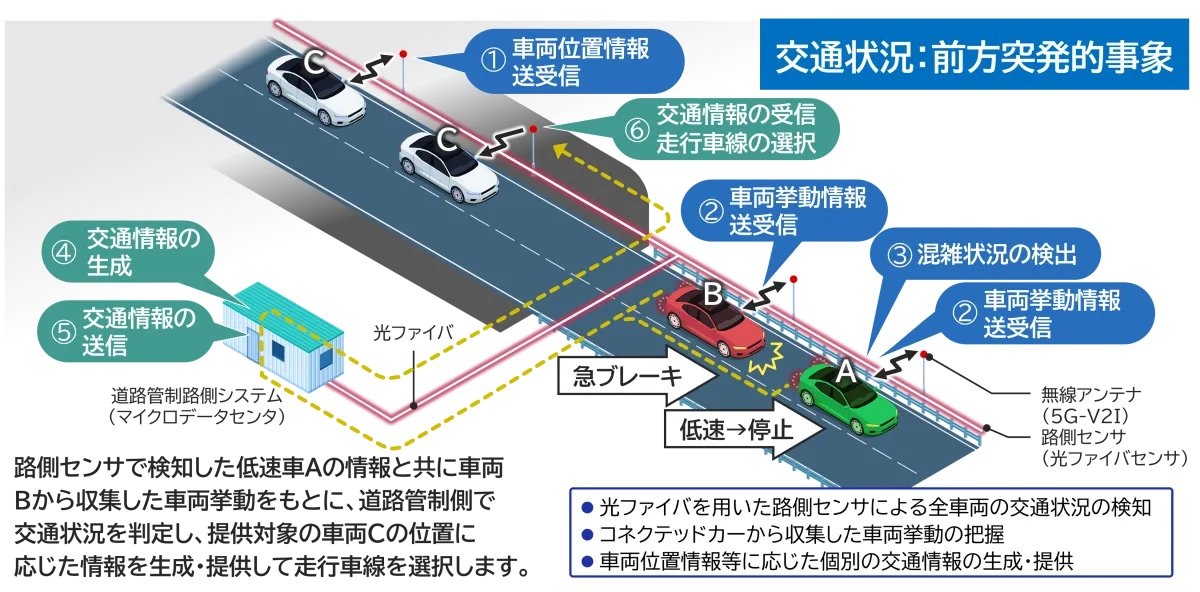
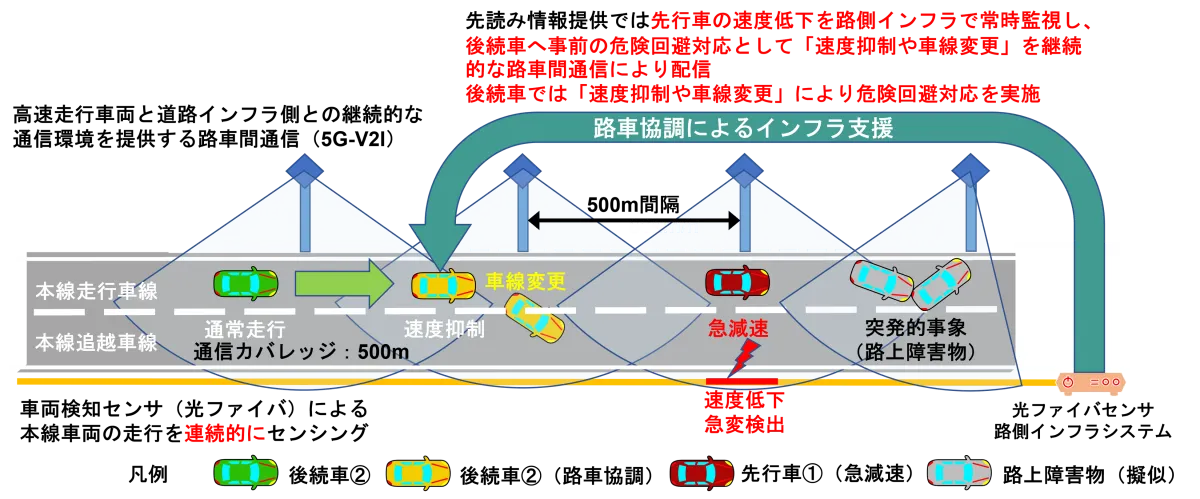
もう1つは「交通状況に応じた車群制御情報の提供」です。こちらは、前方車両が急減速した際に、後続車両への即時通知を行い、安全距離の維持や車線変更を促す情報を提供します。
今後の展望
NECは、自動運転時代の安全かつ快適な高速道路空間の実現に向けて、今後もこの路車協調システムの開発を進めていく方針です。今回の実証実験の成果を基に、さらなる技術革新と社会貢献を目指します。
このように、NECとNEXCO中日本の共同による自動運転支援の取り組みは、自動運転車両の安全性や快適性を進化させる重要なステップとなるでしょう。私たちは、高速道路がより安全な移動手段として確立される未来を楽しみにしています。



会社情報
- 会社名
- 日本電気株式会社
- 住所
- 東京都港区芝5丁目7-1
- 電話番号
トピックス(IT)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。