




四足歩行ロボットとデジタルツインで災害調査を革新する技術が発表
四足歩行ロボットによる被災建築物調査技術
株式会社ポケット・クエリーズが、2025年度日本建築学会大会において、国立研究開発法人 建築研究所と共同で開発した「四足歩行ロボットによる被災建築物調査技術」について発表しました。この技術は、特に災害時の効率的かつ安全な調査の実現を目指しています。
研究の背景
これまでに四足歩行ロボットを用いた災害後の調査方法が模索されてきました。特に、立ち入りが困難な危険区域での調査は、人が行うことができないため、ロボットの活用が期待されています。しかし、調査においてはロボットの運用性や視認性、操作性の問題が残されています。
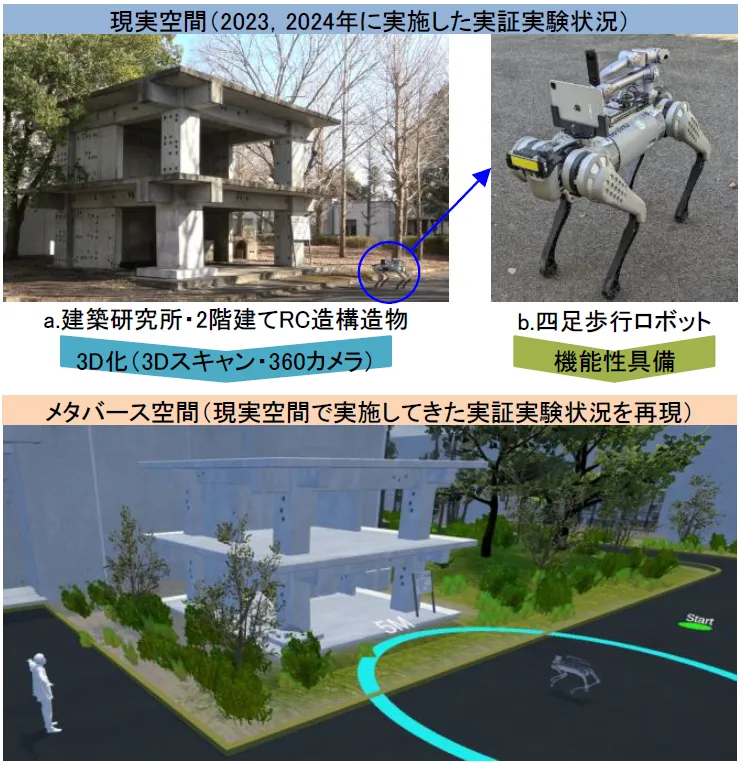
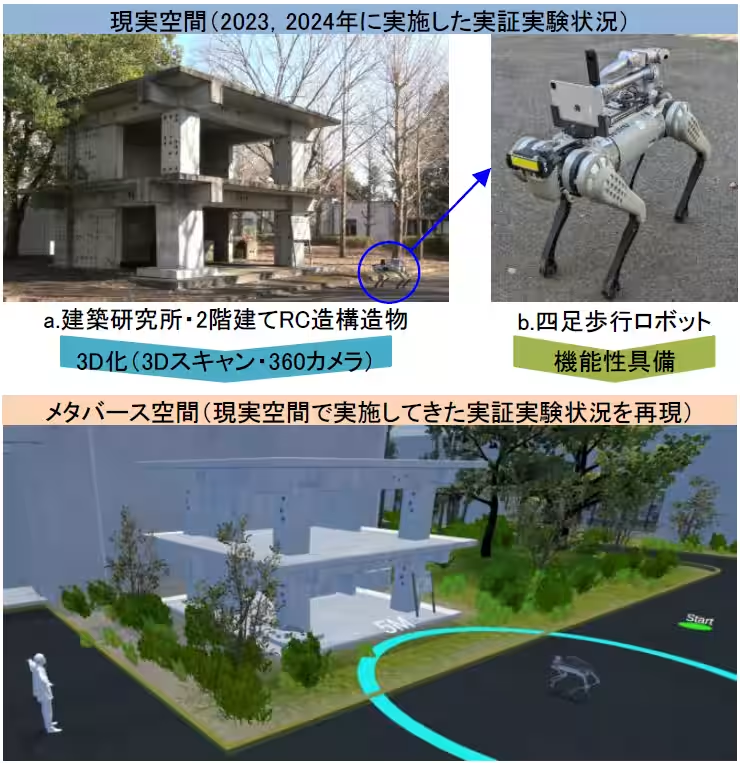
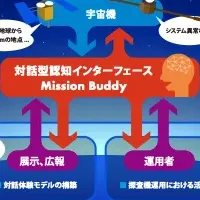
そこで、本研究では新たにデジタルツインという技術を導入。この技術により、現実の被災建築物の3Dモデルが仮想空間に再現され、ロボットの動作をシミュレーションすることが可能になりました。これにより、より効率的で安全な調査方法の検討が進められています。
論文発表の詳細
発表された論文のタイトルは「四足歩行ロボットによる被災建築物調査技術の開発 その4 デジタルツイン技術の開発と運用方法の検討」で、発表は2025年9月10日に行われます。発表者は株式会社ポケット・クエリーズの代表取締役社長、佐々木宣彦氏と、建築研究所の宮内博之氏です。
VR-Robotの導入
今回の研究は、「VR-Robot」アプリケーションの開発を含んでいます。このアプリでは、3Dスキャンで再現された被災建築物をもとに、遠隔操作可能な四足歩行ロボットを用いて調査を行います。ロボットにはカメラ、距離センサー、傾斜センサーが搭載されており、効率的に調査を進めることが可能です。
今後の展望
四足歩行ロボットを活用した調査は、災害現場における安全性や効率性の向上に寄与することが期待されています。特に、ロボティクス技術とAIを融合させることで、より高度な災害対策が実現できるでしょう。ポケット・クエリーズは、これらの技術を駆使し、現場のさまざまな課題解決に取り組んでいく予定です。
代表者のコメント
佐々木氏は、新技術の実装には多くの課題があることを指摘しましたが、試行錯誤の過程で着実に進歩していることを自信を持って語っています。さらに、この技術が現場での安全性と安心感をもたらすことを期待しています。
結論
四足歩行ロボットとデジタルツイン技術の組み合わせは、災害時の建築物調査に新たな可能性をもたらすことになります。今後もこれらの技術の発展に注目が集まりそうです。


会社情報
- 会社名
- 株式会社ポケット・クエリーズ
- 住所
- 東京都新宿区西新宿3-20-2東京オペラシティタワー35F
- 電話番号
- 03-5333-1533
関連リンク
サードペディア百科事典: 東京都 新宿区 四足歩行ロボット ポケット・クエリーズ デジタルツイン技術
Wiki3: 東京都 新宿区 四足歩行ロボット ポケット・クエリーズ デジタルツイン技術
トピックス(科学)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。