





マルチレートセンサ環境における高精度数理モデル化の進展
マルチレートセンサ環境における数理モデル化の進展
熊本大学大学院先端科学研究部の岡島寛准教授を中心とする研究チームは、マルチレートセンサ環境でのシステム同定技術に関する重要な研究成果を発表しました。この研究は、異なるサンプリング周期を持つ複数のセンサを活用し、制御対象の高精度な数理モデルを構築することを目指しています。
1. 研究の背景
近年、制御システムは複数のセンサを組み込むことで、その性能を向上させる傾向があります。しかし、これらのセンサはそれぞれ異なるサンプリング周期を持つため、データの欠損が生じることが多いです。このような環境では、従来のシステム同定理論が適用できず、特に移動ロボットや自動運転システムにおいては、ロバストなモデルベース制御が困難でした。
2. 本研究の目的
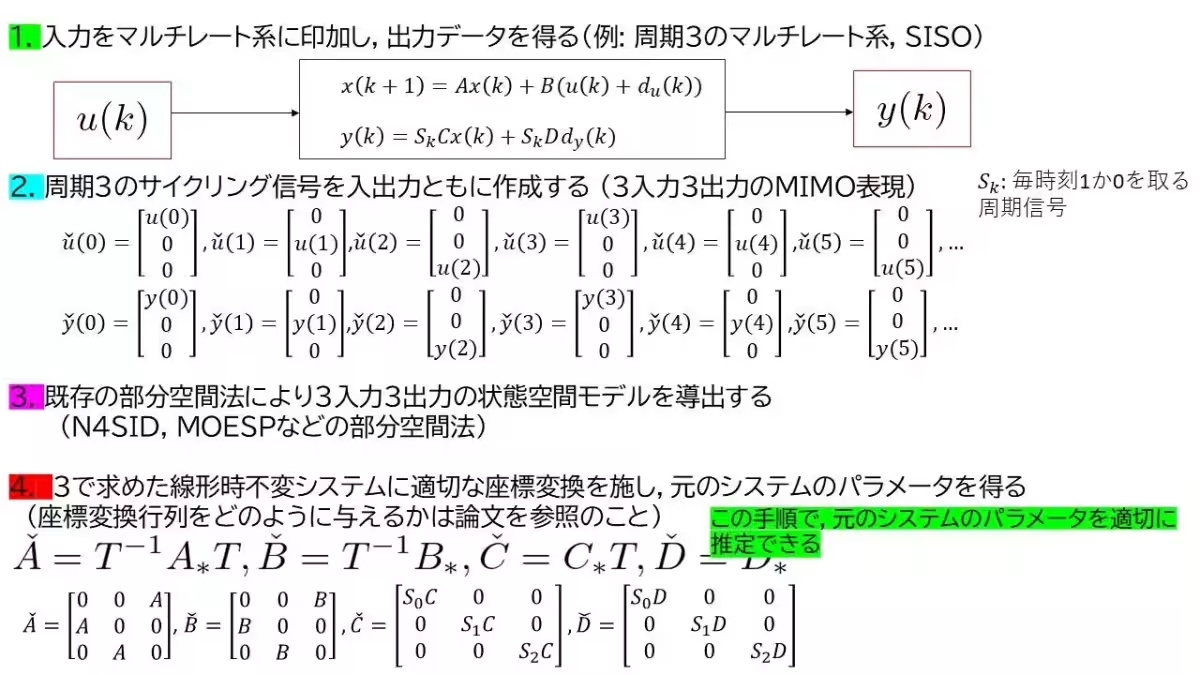
本研究では、マルチレートシステムを周期的に変化するシステムとして捉え、サイクリック再定式化手法を用いて高精度なモデルを構築することを目的としています。この手法により、様々なデータ欠損を持つ中でも、システム同定を実現しようとしています。
3. 研究の内容
岡島准教授らは、複数のサンプリング周期を有するセンサから得られる情報を基に、制御対象の数理モデルを構築するシステム同定アルゴリズムを開発しました。具体的には、マルチレートシステムを周期時変システムとして扱い、サイクリック再定式化により、既存のシステム同定手法へと変換します。この新しいアルゴリズムでは、特別な座標変換を施すことでマルチレートシステムのモデルパラメータを導出し、高精度な同定を実現しています。
4. 研究成果の応用可能性
この研究成果は自動運転システムや移動ロボットの制御に直接応用できる可能性があり、数理モデルの高精度な構築が期待されています。特に、リーダー(LiDAR)、カメラ、IMUなど、異なるサンプリング能力を持つセンサを統合した場合のモデルベース制御の実現に寄与することでしょう。
5. 未来の展望
この研究の成果は、産業界や科学技術分野における制御技術の向上に貢献することが期待されます。また、IoTシステムやセンサネットワークのように、多様なサンプリング周期を持つ複数のセンサが統合される環境でも応用できることが期待されています。
6. 論文情報
今回の研究内容は「Journal of Robotics and Mechatronics」に2025年10月に掲載される予定です。著者には、岡島准教授をはじめ、古川莉早氏、松永信智氏が名を連ねています。論文へのリンクはこちらからご覧いただけます。
このように、マルチレートセンサ環境下での高精度な数理モデル化は、今後さまざまな分野での革新的な技術の基盤となる可能性を秘めています。今後の研究成果に注目が集まります。

会社情報
- 会社名
- 国立大学法人熊本大学
- 住所
- 熊本県熊本市中央区黒髪2-39-1
- 電話番号
- 096-344-2111
トピックス(科学)




【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。