





ロボット技術が切り拓く橋梁耐震補強の未来 - 人機スチュワートプラットフォーム ver.2.0の全貌
ロボット技術が切り拓く橋梁耐震補強の未来
近年、土木技術の進化が著しい中で、ロボット技術が重要な役割を果たしています。特に、株式会社人機一体と株式会社竹中土木が共同開発する「人機スチュワートプラットフォーム ver.2.0」は、2025年に開催予定の国際ロボット展で注目される製品の一つです。このロボットは、橋梁の耐震補強用に設計された鋼製ブラケットを効率的に取り付けるためのもので、土木現場での作業の革命を目指しています。
1. 開発の背景と目的
人機一体と竹中土木は、2022年12月に資本提携を結び、その取り組みの一環として「人機プラットフォーム」を通じた共同開発を始めました。この共同開発では、「ロボットが拓く、新たな土木」というコンセプトの下、橋梁の耐震補強用鋼製ブラケットの取付作業の機械化を目指しています。これにより、従来の手作業による危険で非効率な作業を、ロボットによってより安全かつ迅速に行うことが可能になると期待されています。
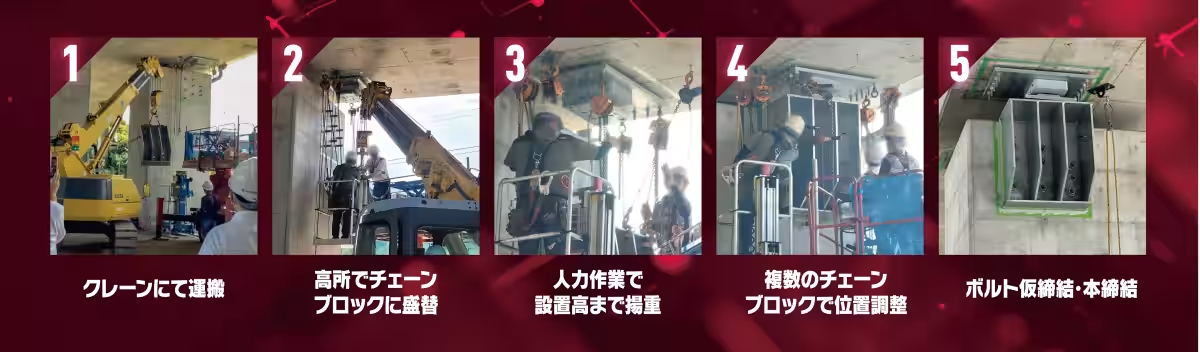
2. 従来工法の課題
従来の橋梁耐震補強工事では、重量物である鋼製ブラケットを取り付ける際、クレーンを使用するものの、その高さに制限があり、作業は手作業での微調整が不可欠でした。このため安全面や作業効率の低下が長年の課題となっています。作業者は高所での作業を行う必要があり、安全性を確保するためにさまざまな対策が必要でした。
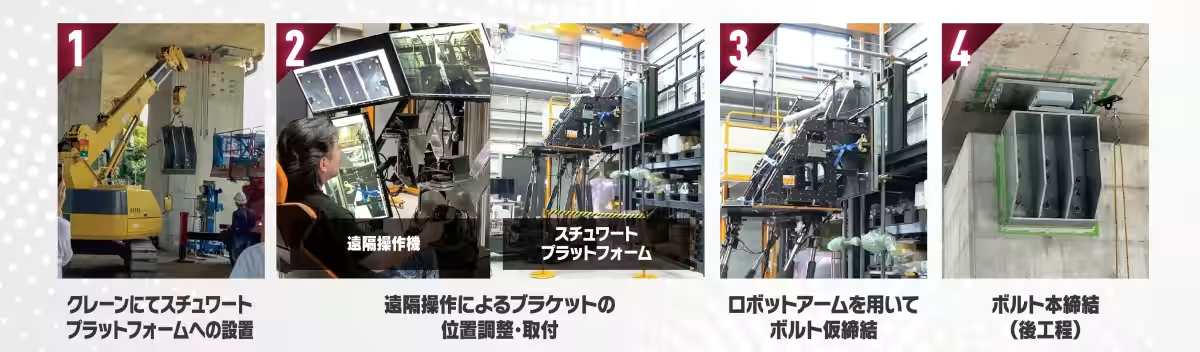
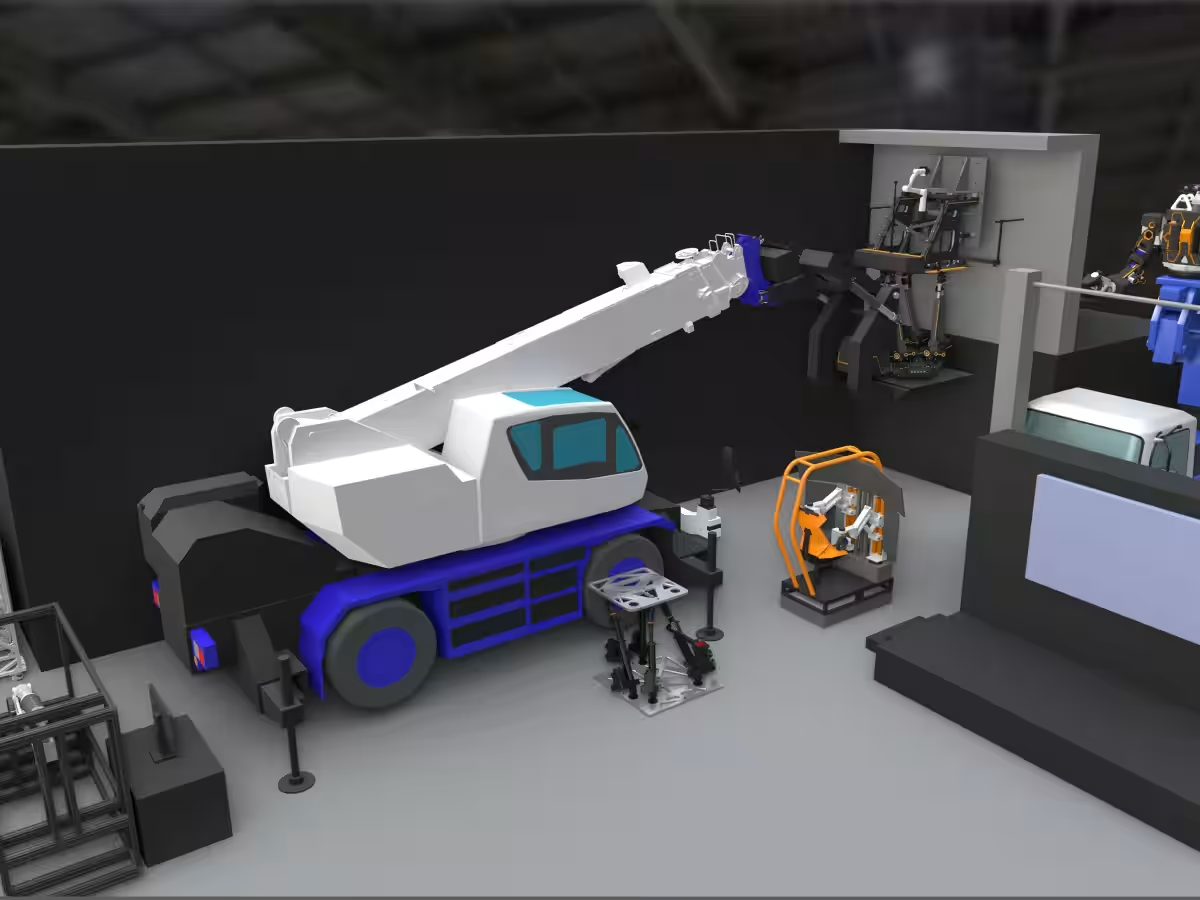
3. 人機スチュワートプラットフォーム ver.2.0の概要
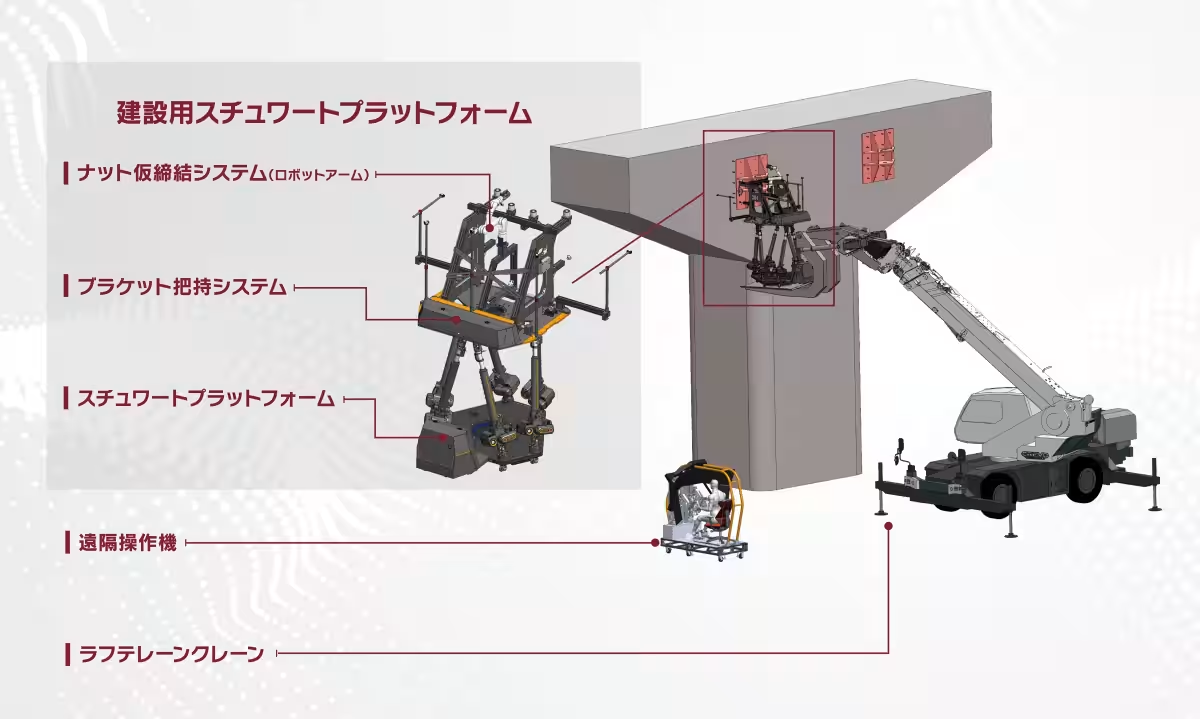
今回の「人機スチュワートプラットフォーム ver.2.0」は、ナット仮締結システムやブラケット把持システム、スチュワートプラットフォームから構成されています。この新しいロボットシステムは、揚重機械のブーム先端につけた状態で操作され、ブラケットの位置や姿勢を自由に調整できる機能を備えています。これにより、従来の約120分の作業時間が約30分に短縮される見込みです。
3.1 具体的な機能
- - ナット仮締結システム:このシステムはロボットアームを使用し、ブラケットを取り付けた後のナット仮締結を行います。このシステムは7自由度ロボットアームを搭載し、複雑な作業を効率的にこなします。
- - ブラケット把持システム: 電磁石を利用したこのシステムにより、ブラケットの吸着、一時的な保持、取り付け解除が可能になります。
- - スチュワートプラットフォーム:新たな「下から持ち上げる」このシステムは、鋼製ブラケットの取り付けの可動範囲を広げ、効率的かつ安全に重量物を扱うことができます。
4. 2025 国際ロボット展での展示
「人機 GSP ver.2.0」は、2025年12月に東京ビッグサイトで開催される国際ロボット展(iREX2025)で新たに発表される予定です。この展覧会では、実際の高所での鋼製ブラケット取付作業のデモンストレーションが行われ、社会実装への可能性も示されます。
5. 今後の展望
このプロジェクトは、2026年中を目標に実地試験を進め、現場での導入を目指しています。今後は、製品化に向けての企業連携や実証試験が進むことで、橋梁耐震補強の現場において、ロボットが新たなスタンダードとなることが期待されます。
6. 社会的意義
橋梁耐震補強作業のロボット化は、作業者の安全を確保しつつ、作業効率を向上させる可能性を秘めています。こうした技術革新が進むことで、土木分野におけるロボット技術の社会実装が進み、より安全で効率的な作業環境の実現へとつながっていくことでしょう。
これからの時代、ロボットがどのように土木業界に変革をもたらすのか、非常に楽しみです。国際ロボット展での具体的な展示に注目です。







会社情報
- 会社名
- 株式会社人機一体
- 住所
- 滋賀県草津市青地町 648-1秘密基地人機一体
- 電話番号
トピックス(地域情報)

【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。