



未来の海洋インフラを支える「海水中非接触電力伝送」の挑戦
海洋調査の新たな一歩
近年、海洋資源の調査や保守点検が重要視される中、海中ロボットの運用がその中心となっています。そんなロボットの運用を革新する技術として、東海大学大学院の杉野晴紀氏が取り組む「海水中非接触電力伝送」が注目されています。
杉野氏は、現在修士課程に在籍し、稲森研究室にて研究を進めています。彼の主な研究テーマは水中ロボットの運用効率化であり、特に自律型無人潜水機(AUV)や遠隔操作型無人潜水機(ROV)の課題を解決するための技術開発を行っています。
課題と解決策
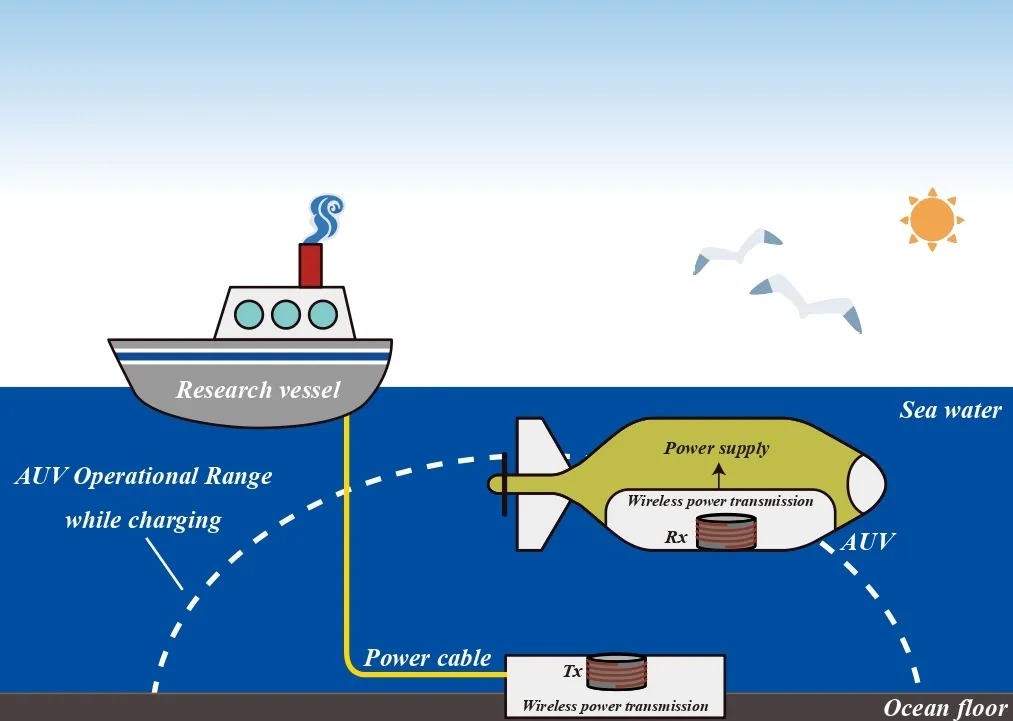
従来のAUVはバッテリーで動作し、定期的に海面に浮上して給電を受ける必要があります。このため、稼働時間が限られ、調査の幅も狭まってしまいます。一方のROVは供給ケーブルに依存し、その長さが移動の範囲を制約します。これらの問題を克服するため、杉野氏は非接触で電力を供給できるシステムを提案しています。
その方法は、海上の作業船から電源ケーブルを海中に伸ばし、海底に設置した電力伝送装置を介して水中ロボットに電力を供給するというものです。この技術が実現すれば、バッテリー交換のための海上作業が不要になり、作業時間が短縮されます。また、電極が露出しない安全な方式であるため、従来的な接触式充電よりも安全性が向上することが期待されます。
技術の背景と意義
杉野氏がこの研究に取り組むきっかけは、「面白いから」という純粋な好奇心でした。技術の実現が日本の海洋資源や経済発展に寄与する可能性を感じた彼は、日本の抱える海洋課題に挑む決意を固めました。この技術が進化すれば、海底資源の開発、長期的な海洋調査、さらには再生可能エネルギーの活用にも影響を与えるでしょう。
技術の実現に向けた課題
しかし、技術の実現にはいくつかの課題が伴います。杉野氏が直面している最大の課題は、海水中における電力伝送効率の低下です。空気中でのワイヤレス給電に比べ、海水中では効率が大幅に減少することが確認されています。これに対処するために、彼は以下の取り組みを行っています。
- - 海水環境での電力伝送特性の詳細な分析。
- - 磁界解析シミュレーションを用いた電力伝送の可視化。
- - 送受電コイルの最適化研究。
未来に描くビジョン
杉野氏のビジョンは、海洋での電力供給が日常的に行われ、水中ロボットがより自由に活動する未来です。これにより、海洋調査がより効率的に行えるようになり、AUVが自律的に充電しながら長時間データを収集することが可能になると考えています。また、技術の進展により新たな海洋産業の基盤が形成される可能性も秘めています。
研究とキャリアの展望
杉野氏は、来年から企業でセールスエンジニアとして就職し、技術を社会や産業に活かす役割を担うことになります。研究者として培った経験をもとに、クライアントのニーズに応じたソリューションを提案し、持続可能な社会の実現に貢献したいと語っています。
技術発信とコミュニティの重要性
最後に、杉野氏は研究だけでなく技術を広く発信することと、研究者同士のつながりを大切にしています。彼は他大学の学生や教授と連携し、「東海大学 Student Branch」を設立し、多様な分野の知見を交流させる場を作ることにも注力しています。これにより、技術の発展と社会実装を進めるための活動を続けていく意向を示しています。
このように、杉野晴紀氏の研究は、海洋調査の効率化に寄与する一方で、日本が持つ海洋資源の活用にも大きな影響を与える可能性を秘めています。彼の挑戦から生まれる技術革新が、未来の海洋インフラを支えることを期待したいです。


会社情報
- 会社名
- IEEE
- 住所
- 電話番号
トピックス(科学)



【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。