




ユアサ商事とThinker、バラ積みピッキングロボットを共同開発 - 薄い成型物の自動化に貢献 -
ユアサ商事株式会社と株式会社Thinkerは、薄く繊細な成型物のピッキング自動化を実現するバラ積みピッキングロボットを共同開発したと発表しました。
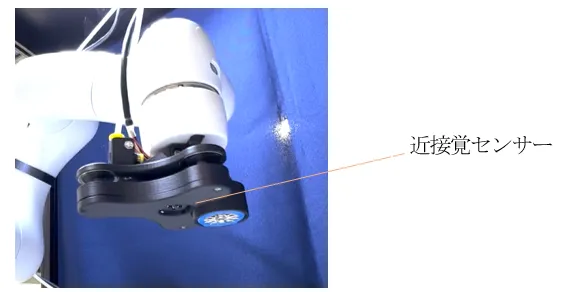
従来、薄くて壊れやすいせんべいや薄型の樹脂成型品などのピッキングは、破損のリスクが高く自動化が困難でした。しかし、今回の開発により、ロボットの指先センサーである近接覚センサーと2Dカメラを組み合わせることで、対象物までの距離を素早く解析し、繊細な動きでピッキングを可能にしました。
この技術により、従来は困難だった薄く繊細な成型物の自動化を実現し、製造現場の省人化に大きく貢献すると期待されています。
これまで、薄く繊細な成型物のピッキング自動化には、以下の課題がありました。
奥行きの距離感認識の難しさ: 従来のロボットシステムでは、奥行きの距離感を正確に認識することが難しく、対象物を傷つけないようにするためには、対象物の重なりを防ぐベルトコンベアーなどの大型設備が必要でした。
高額な3Dカメラシステム: 対象物を正確に認識するためには、高額な3Dカメラシステムの導入が必要でした。
画像解析時間の遅さ: 3Dカメラで撮影した画像の解析には時間がかかるため、ピッキング作業の速度が遅くなるという課題もありました。
開発されたバラ積みピッキングロボットは、近接覚センサーと2Dカメラを組み合わせることで、これらの課題を解決しました。
高速な距離感解析: 近接覚センサーにより、対象物までの距離を素早く解析し、ロボットの動作速度を調整することで、対象物を傷つけることなくピッキングを行うことができます。
低コスト化: 2Dカメラを用いることで、高額な3Dカメラシステムの導入が不要になり、システム全体の低コスト化を実現しました。
高速なピッキング処理: 2Dカメラの画像解析は、3Dカメラよりも高速に行えるため、ピッキング作業のスピードアップに貢献します。
ユアサ商事とThinkerは、開発されたバラ積みピッキングロボットを、食品、樹脂、薄い金属など、さまざまな分野の製造工程に導入していく予定です。特に、薄くて割れやすい煎餅などの食品のピック&プレイスや、山積みになっているワークのピッキングなど、従来の自動化が困難だった作業の自動化に期待されています。
この技術は、製造現場の省人化や効率化に大きく貢献するとともに、人手不足問題の解決にも役立つと期待されています。


従来、薄くて壊れやすいせんべいや薄型の樹脂成型品などのピッキングは、破損のリスクが高く自動化が困難でした。しかし、今回の開発により、ロボットの指先センサーである近接覚センサーと2Dカメラを組み合わせることで、対象物までの距離を素早く解析し、繊細な動きでピッキングを可能にしました。
この技術により、従来は困難だった薄く繊細な成型物の自動化を実現し、製造現場の省人化に大きく貢献すると期待されています。
開発の背景と課題
これまで、薄く繊細な成型物のピッキング自動化には、以下の課題がありました。
奥行きの距離感認識の難しさ: 従来のロボットシステムでは、奥行きの距離感を正確に認識することが難しく、対象物を傷つけないようにするためには、対象物の重なりを防ぐベルトコンベアーなどの大型設備が必要でした。
高額な3Dカメラシステム: 対象物を正確に認識するためには、高額な3Dカメラシステムの導入が必要でした。
画像解析時間の遅さ: 3Dカメラで撮影した画像の解析には時間がかかるため、ピッキング作業の速度が遅くなるという課題もありました。
開発されたバラ積みピッキングロボットの特長
開発されたバラ積みピッキングロボットは、近接覚センサーと2Dカメラを組み合わせることで、これらの課題を解決しました。
高速な距離感解析: 近接覚センサーにより、対象物までの距離を素早く解析し、ロボットの動作速度を調整することで、対象物を傷つけることなくピッキングを行うことができます。
低コスト化: 2Dカメラを用いることで、高額な3Dカメラシステムの導入が不要になり、システム全体の低コスト化を実現しました。
高速なピッキング処理: 2Dカメラの画像解析は、3Dカメラよりも高速に行えるため、ピッキング作業のスピードアップに貢献します。
今後の展開
ユアサ商事とThinkerは、開発されたバラ積みピッキングロボットを、食品、樹脂、薄い金属など、さまざまな分野の製造工程に導入していく予定です。特に、薄くて割れやすい煎餅などの食品のピック&プレイスや、山積みになっているワークのピッキングなど、従来の自動化が困難だった作業の自動化に期待されています。
この技術は、製造現場の省人化や効率化に大きく貢献するとともに、人手不足問題の解決にも役立つと期待されています。
トピックス(IT)









【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。